131 1300 0010
著路上車輛數量不斷增加,停車位置也越來越小,停車成為了讓很多司機頭疼的問題。甚至還有一些不法分子利用視野盲區進行碰瓷,敲詐勒索等違法行為。由此,360環視系統也被眾多駕駛員認可,接下來將為大家介紹下這個360環視系統。
360環視系統,是一套利用多個廣角攝像頭并通過車載顯示屏幕顯示汽車四周360度全景融合鳥瞰圖像的泊車輔助系統,也叫全景倒車影像系統,全景泊車系統等。
它可以幫助汽車駕駛員了解車輛周邊視線盲區,從而更為直觀、更為安全地停泊車輛。整個系統的組成主要包括多個廣角攝像頭(多為4個),攝像頭解碼芯片,主處理器,電源管理芯片,液晶屏等。
其基本工作原理是主處理器通過攝像頭解碼芯片采集4個廣角攝像頭的原始數據,通過內部的算法將4個攝像頭數據無縫融合成一幅鳥瞰圖,顯示到液晶屏上。
ZLG提供完整的360環視解決方案,包括基于LVDS和基于以太網的方案,兩者僅在攝像頭的數據傳輸方式上有所差別。
一.基于LVDS傳輸的360環視方案
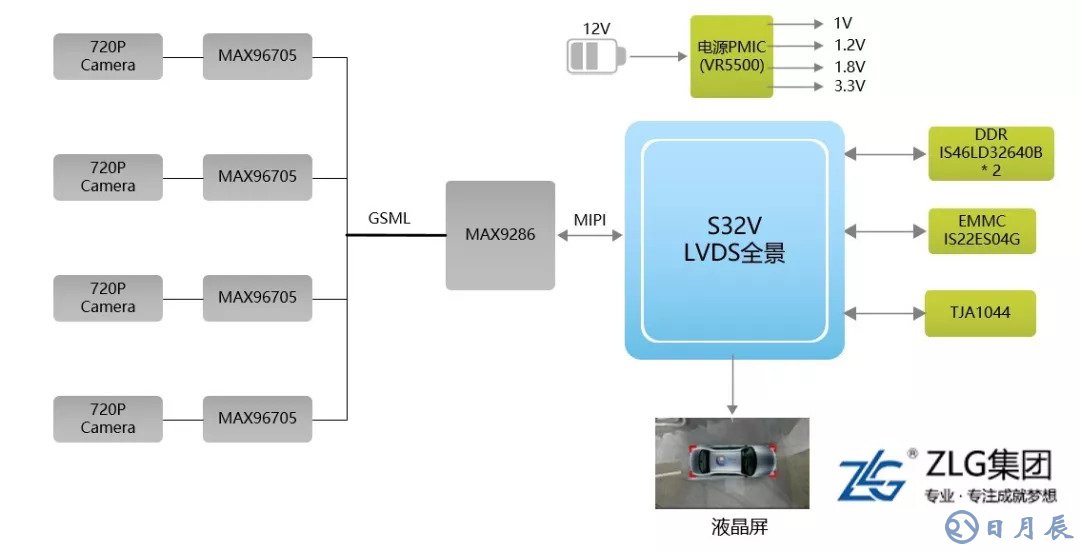 圖1 基于LVDS的360環視方案框圖
圖1 基于LVDS的360環視方案框圖
方案簡介:攝像頭端利用MAX96705將攝像頭數據串行發出,而MAX9286解串器可通過長達15米的屏蔽雙絞線(STP)或同軸電纜接收并同步來自4個攝像頭的視頻信號,通過MIPI CSI-2將數據傳入S32V,S32V將圖像數據進行融合拼接,再顯示在液晶屏上。
二.基于以太網傳輸的360環視方案
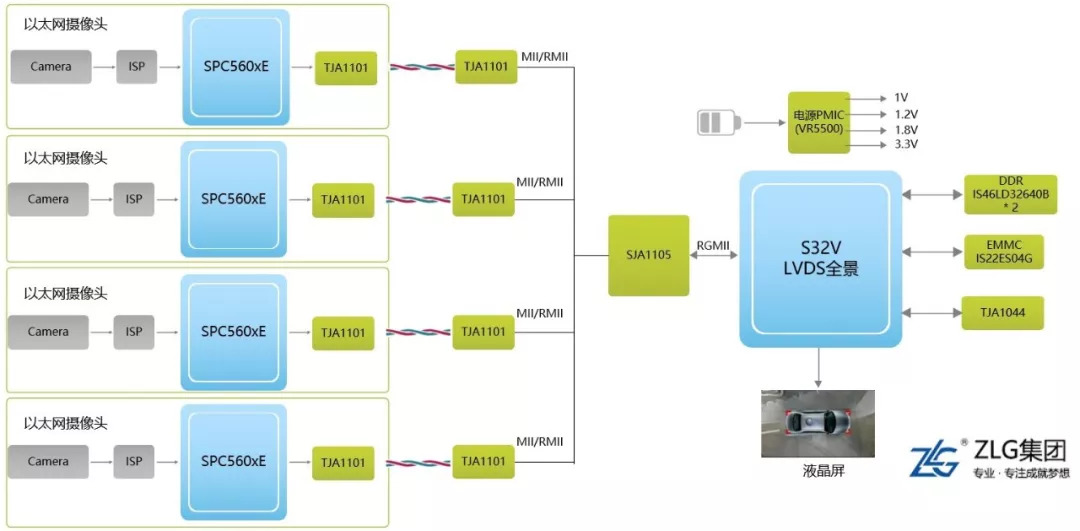
圖2 基于以太網的360環視方案框圖
方案簡介:攝像頭端SPC560xE將攝像頭數據采集并編碼,隨后通過以太網將數據發送到網關SJA1105,網關將4路攝像頭數據轉發至S32V,S32V解析圖像數據并對數據進行融合拼接并顯示。
三.主處理器平臺S32V介紹
S32V芯片框圖如下:
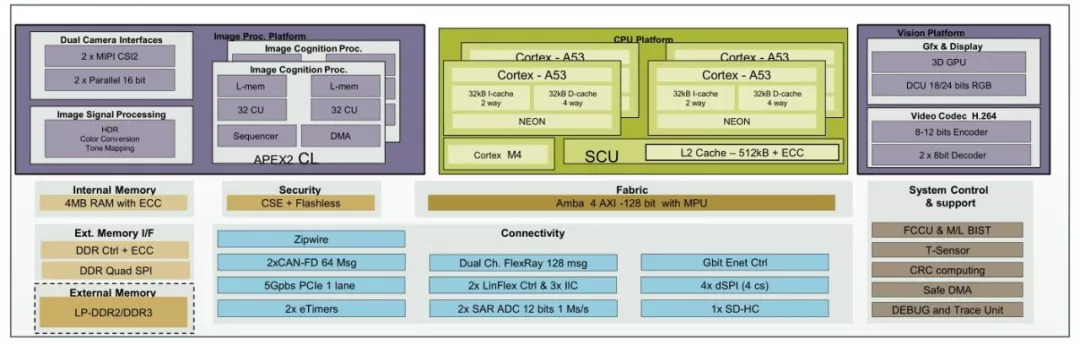
圖3 S32V芯片框圖
S32V是NXP推出的一款汽車視覺微處理器,多達4 x A53@1GHz和1 x M4@133MHz內核,具有強大的運算處理能力。S32V包含2個APEX核,可以輕松實現圖像視頻的檢測,識別,分類等應用。S32V內部具有ISP,用戶可以根據自己的應用在ISP跑相應的算法,從而可以使得攝像頭數據更清晰,融合效果與顯示效果更好。此外,S32V還包含一顆強大的3D GPU——GC3000,可輕松的將多路圖像數據進行融合拼接,完美實現360環視效果。
下圖給出了Vivante公司的一些主流GPU的性能參數:
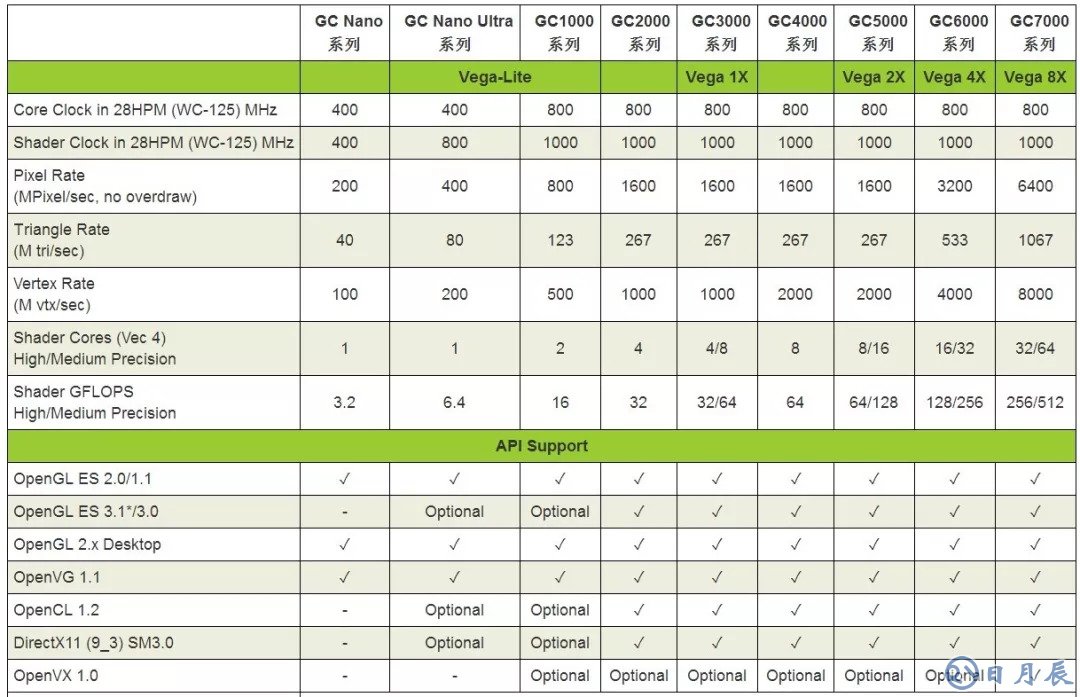
圖4 Vivante主流GPU參數
四、豐富的開發資源
我們可提供S32V的核心板以及底板供您調試開發,同時也提供豐富的硬件設計資料,軟件例程資料。讓您在最短時間上手S32V平臺!
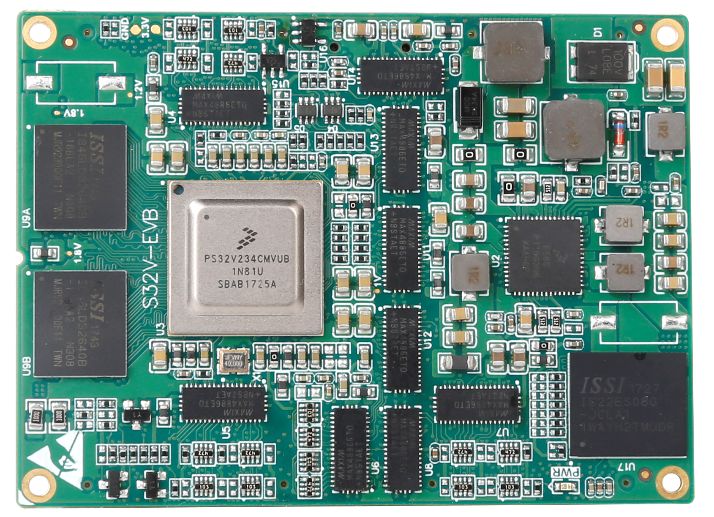
圖5 S32V核心板圖片
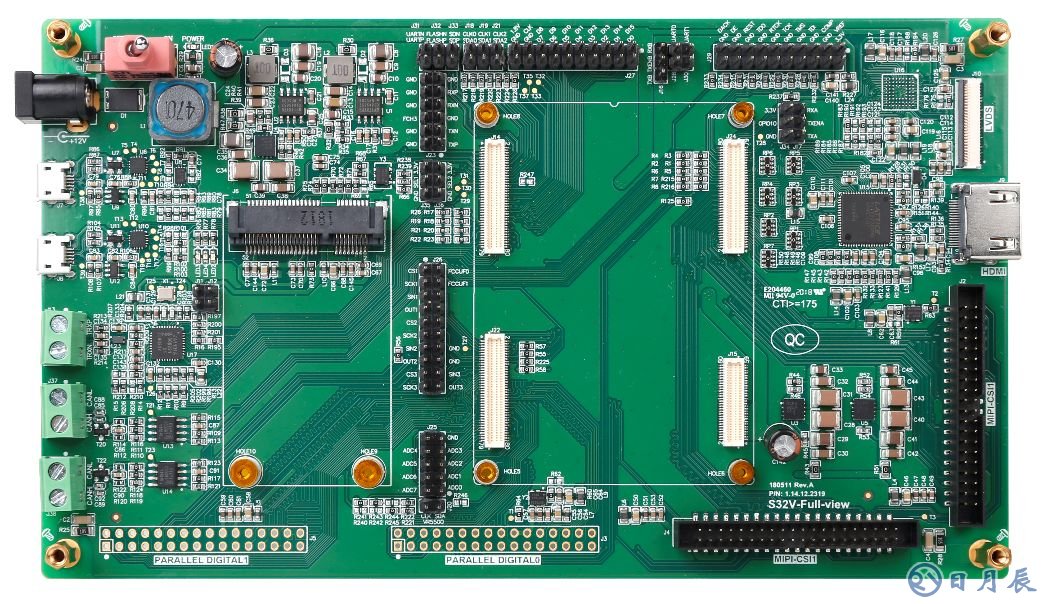
圖6 S32V底板圖片
目前360環視產品已經普及,下一代的360環視系統將會做的更清晰,效果也將逐漸由2D發展成3D,同時功能上可能會增加一些圖像識別功能。

