131 1300 0010
從傳統的工業機器人系統到當今最新的協作機器人,各類機器人都依賴于能夠生成和處理大量高度變化數據的傳感器。這些數據可用于啟用能夠做出實時決策的自主機器人,從而實現更智能的事件管理,同時在動態的真實環境中保持生產力,如圖1所示。
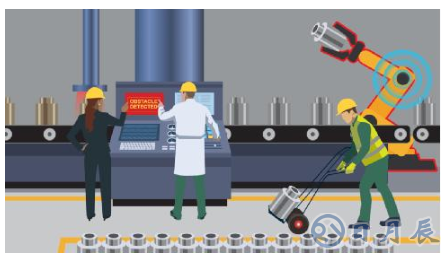
圖1:毫米波(mmWave)傳感有助于監控機器周圍區域,實現實時事件管理
TI毫米波傳感器如何在工廠實現高級智能化
德州儀器(TI)的毫米波(mmWave)傳感器能夠利用集成處理器處理片上數據,以實現實時決策。與某些基于光或視覺的傳感器相比,這種集成實現了更小型設計。此外,僅使用單個傳感器檢測多個對象和處理數據的能力可降低整體系統成本。
對工廠環境中的另一個重要考慮因素是對灰塵、煙霧和可變照明等環境條件的免疫。毫米波傳感器可在任何這些條件下運行 - 并安裝在外殼塑料后面 - 無需外部透鏡、孔徑或傳感器表面。所有這些屬性使毫米波傳感器在工業傳感應用中表現良好。
TI毫米波傳感器不僅可測量距離
智能化邊緣處理允許工廠機器和機器人與人交互,并減少事故發生。例如,可配置TI毫米波傳感器來監控機器周圍的特定相關區域,定義禁區,并向區域內的人員發出警告。可對這些區域進行分區,使得傳感器可基于區域占用情況或人員接近度而相應地做出相應反應。圖2演示了此功能,其中綠色區域表示安全;黃色區域表示警告,而紅色區域表示危險,表明接近機器。
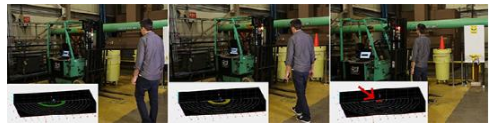
圖2:人員緩慢走過一臺機器,危險信號在1米處閃爍
TI毫米波傳感器不僅可精確測量視野中物體的距離,還可測量任何障礙物的相對速度。這使得機器人能夠根據物體接近傳感器的速度采取更多預測動作,如停止機器。圖3所示為機器根據接近機器的人員的速度觸發危險區域警告的速度。

圖3:當一個人慢走時,危險標志在1米處觸發(a);當一個人快走時,危險標志在2米處觸發(b)
為提高生產率,您希望機器避免因錯誤觸發而停止。圖4中的示例所示為集成跟蹤算法如何使傳感器準確地確定人員方向。當有人離開機器時,它不會打開警告信號,也不會采取其他行動。
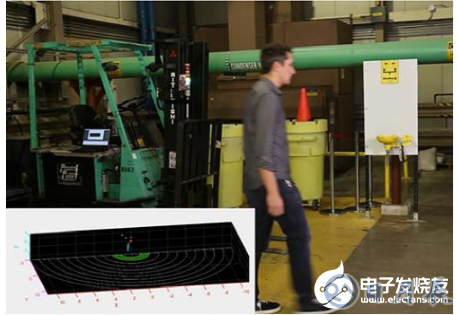
圖4:傳感器不指示危險信號,因為有人正在離開機器
簡化機器人設計并加快開發速度
為了簡化機器人系統的設計并縮短開發時間,請訪問我們的區域掃描儀 例程 。它的特點是新增了靜態對象檢測算法,能夠檢測到可能留在機器人“禁區”內的靜態對象,例如盒子、手推車或其他設備,同時忽略永久靜態對象,例如可能已成為場景一部分的柱子。該 例程在TI毫米波IWR6843ISK 、IWR6843ISK-ODS和IWR6843AoP評估模塊(EVM)上運行。
使用我們的 片上天線(AOP)傳感器,其特征是將射頻(RF)天線蝕刻到芯片的封裝上,與其他雷達技術相比,可節省75%的電路板面積,從而幫助您設計出體積更小的系統,如圖5所示。
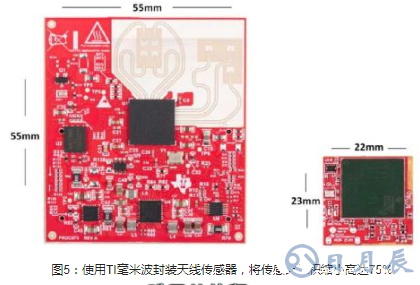
圖5:使用TI毫米波封裝天線傳感器,將傳感器體積縮小高達75%

