131 1300 0010
引言
在光通信領(lǐng)域,更大的帶寬、更長(zhǎng)的傳輸距離、更高的接收靈敏度,永遠(yuǎn)都是科研者的追求目標(biāo)。盡管波分復(fù)用(WDM)技術(shù)和摻鉺光纖放大器(EDFA)的應(yīng)用已經(jīng)極大的提高了光通信系統(tǒng)的帶寬和傳輸距離,伴隨著視頻會(huì)議等通信技術(shù)的應(yīng)用和互聯(lián)網(wǎng)的普及產(chǎn)生的信息爆炸式增長(zhǎng),對(duì)作為整個(gè)通信系統(tǒng)基礎(chǔ)的物理層提出了更高的傳輸性能要求。光通信系統(tǒng)采用強(qiáng)度調(diào)制/直接檢測(cè)(IM/DD),即發(fā)送端調(diào)制光載波強(qiáng)度,接收機(jī)對(duì)光載波進(jìn)行包絡(luò)檢測(cè)。盡管這種結(jié)構(gòu)具有簡(jiǎn)單、容易集成等優(yōu)點(diǎn),但是由于只能采用ASK調(diào)制格式,其單路信道帶寬很有限。因此這種傳統(tǒng)光通信技術(shù)勢(shì)必會(huì)被更先進(jìn)的技術(shù)所代替。然而在通信泡沫破滅的今天,新的光通信技術(shù)的應(yīng)用不可避免的會(huì)帶來(lái)對(duì)新型通信設(shè)備的需求,面對(duì)居高不下的光器件價(jià)格,大規(guī)模通信設(shè)備更換所需要的高額成本,是運(yùn)營(yíng)商所不能接受的,因此對(duì)設(shè)備制造商而言,光纖通信新技術(shù)的研發(fā)也面臨著很大的風(fēng)險(xiǎn)。如何在現(xiàn)有的設(shè)備基礎(chǔ)上提高光通信系統(tǒng)的性能成為了切實(shí)的問(wèn)題。在這樣的背景下,二十多年前曾被寄予厚望的相干光通信技術(shù),再一次被放到了桌面上。
相干光通信的理論和實(shí)驗(yàn)始于80年代。由于相干光通信系統(tǒng)被公認(rèn)為具有靈敏度高的優(yōu)勢(shì),各國(guó)在相干光傳輸技術(shù)上做了大量研究工作。經(jīng)過(guò)十年的研究,相干光通信進(jìn)入實(shí)用階段。英美日等國(guó)相繼進(jìn)行了一系列相干光通信實(shí)驗(yàn)。AT&T及Bell公司于1989和1990年在賓州的羅靈—克里克地面站與森伯里樞紐站間先后進(jìn)行了1.3μm和1.55μm波長(zhǎng)的1.7Gbit/s FSK現(xiàn)場(chǎng)無(wú)中繼相干傳輸實(shí)驗(yàn),相距35公里,接收靈敏度達(dá)到-41.5dBm。NTT公司于1990年在瀨戶(hù)內(nèi)陸海的大分—尹予和吳站之間進(jìn)行了2.5Gbit/s CPFSK相干傳輸實(shí)驗(yàn),總長(zhǎng)431公里。直到19世紀(jì)80年代末,EDFA和WDM技術(shù)的發(fā)展,使得相干光通信技術(shù)的發(fā)展緩慢下來(lái)。在這段時(shí)期,靈敏度和每個(gè)通道的信息容量已經(jīng)不再備受關(guān)注。然而,直接檢測(cè)的WDM系統(tǒng)經(jīng)過(guò)二十年的發(fā)展和廣泛應(yīng)用后,新的征兆開(kāi)始出現(xiàn),標(biāo)志著相干光傳輸技術(shù)的應(yīng)用將再次受到重視。在數(shù)字通信方面,擴(kuò)大C波段放大器的容量,克服光纖色散效應(yīng)的惡化,以及增加自由空間傳輸?shù)娜萘亢头秶殉蔀橹匾目紤]因素。在模擬通信方面,靈敏度和動(dòng)態(tài)范圍成為系統(tǒng)的關(guān)鍵參數(shù),而他們都能通過(guò)相關(guān)光通信技術(shù)得到很大改善。
本次設(shè)計(jì)將以單片機(jī)作為主控系統(tǒng),設(shè)計(jì)合適的相干光通信系統(tǒng),能夠在系統(tǒng)中進(jìn)行信息碼輸著這個(gè)目的以完成本是設(shè)計(jì)。
系統(tǒng)結(jié)構(gòu):
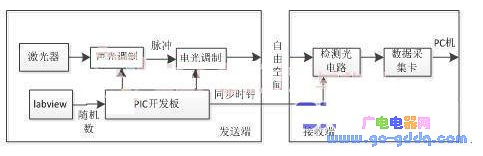
如下圖所示:本系統(tǒng)主要是完成相干光前端的信號(hào)調(diào)制控制和系統(tǒng)同步控制。其中發(fā)射端包括生光控制系統(tǒng)和電光控制系統(tǒng),包括幅度調(diào)制和相位調(diào)制將是PIC單片機(jī)的主要控制工作。
2.1發(fā)射控制模塊設(shè)計(jì)
2.1.1聲光控制模塊
激光器(SDL5412)發(fā)出的是連續(xù)光,而在信號(hào)傳輸?shù)倪^(guò)程中需要提供同步時(shí)鐘以使發(fā)送端和接收端能夠同步。在本系統(tǒng)設(shè)計(jì)中,對(duì)光源產(chǎn)生的連續(xù)激光進(jìn)行聲光調(diào)制,產(chǎn)生脈沖光信號(hào),作為接收端的同步信號(hào)。
1 聲光調(diào)制器:
本系統(tǒng)中采用的聲光調(diào)制器(MT80-B30A1-IR)集成了了聲光介質(zhì)、電聲換能器、吸聲(或反射)裝置等。調(diào)制器中所采用的聲光晶體為TeO2 。
TeO2晶體是一種具有高品質(zhì)因數(shù)的聲光材料,有良好的雙折射和旋光性能,沿[110]方向傳播的聲速慢;具有響應(yīng)速度快、驅(qū)動(dòng)功率小、衍射效率高、性能穩(wěn)定可靠等優(yōu)點(diǎn)。它是制做聲光偏轉(zhuǎn)器、調(diào)制器、諧振器、可調(diào)濾光器等各類(lèi)聲光器件的理想單晶材料。
2 調(diào)制信號(hào)驅(qū)動(dòng)器:
系統(tǒng)中的聲光調(diào)制信號(hào)由直接數(shù)字合成器(DDS)產(chǎn)生,利用DDS信號(hào)源可以方便地實(shí)現(xiàn)對(duì)輸出頻率和幅度的數(shù)字控制。DDS信號(hào)源的控制端口有31位頻率控制和8位幅度控制。
3 控制模塊設(shè)計(jì):
控制模塊實(shí)現(xiàn)對(duì)聲光調(diào)制信號(hào)驅(qū)動(dòng)器的控制,使其產(chǎn)生頻率為80MHz、幅度為脈沖波的射頻信號(hào),以驅(qū)動(dòng)聲光調(diào)制晶體進(jìn)行聲光調(diào)制。
控制模塊主要由PIC單片機(jī)加外圍控制電路實(shí)現(xiàn)。由于控制需要的引腳數(shù)量較多(31位頻率控制,1位頻率鎖定,8位幅度控制,1位外部觸發(fā)位,共41位),主控單片機(jī)采用PIC系列的來(lái)實(shí)現(xiàn),采用2位設(shè)置固定頻率,8位設(shè)置幅度,1位觸發(fā)。下圖2給出聲光調(diào)制硬件結(jié)構(gòu)圖:
電路設(shè)計(jì)時(shí)候首先考慮用變壓器降壓到合適電壓,整流濾波后在通過(guò)穩(wěn)壓芯片穩(wěn)壓,集成穩(wěn)壓片輸出電源擺動(dòng)值比較小,合適的集成芯片主要是5V好12V輸出的比較多這里面就選擇用2個(gè)MC7812或者LM7812 提供24V電壓,一個(gè)MC7805或者LM7805提供5V電壓,電路在500MA保持住。
電源模塊的電路如圖4所示:
PIC控制主要考慮的是控制聲光調(diào)制器產(chǎn)生一定幅度和頻率的脈沖光信號(hào)。
聲光調(diào)制在本系統(tǒng)中有兩個(gè)作用:把連續(xù)激光變成120NS的脈沖光,第一:發(fā)送端作為本地載波。第二:接收端作為本地振蕩信號(hào),提供時(shí)鐘。
這里使用的是MT80-B30AI-IR聲光調(diào)制器,由于器件提供線(xiàn)性調(diào)制,我們理論上要按照器件提供的參數(shù)操作:
由串口控制:
由于控制接口采用的是44端的并行端口,這里面要找數(shù)量多點(diǎn)的IO端口進(jìn)行輸入,實(shí)驗(yàn)室采用的是具有53個(gè)IO端口的PIC32作為編程器。這里面考慮2個(gè)方面的控制
脈沖光的頻率:
輸出頻率設(shè)置為:80MHZ,代入上式:
=343597383.68
變?yōu)?進(jìn)制:00101000011110101110000101000111
用PIC單片機(jī)輸出,輸出前先鎖存,穩(wěn)定后輸出,只設(shè)兩個(gè)端口,一個(gè)輸出0,一個(gè)輸出1,保證頻率不變。
主要是控制并口的:
這里面幅度有8位數(shù)控制,控制數(shù)與幅度大小成正比,也就是說(shuō)從255到0控制幅度最大的值到最小的值。設(shè)置

8位碼控制。實(shí)際上實(shí)驗(yàn)室采用的是10000001碼,可以用并口直接寫(xiě)入。
控制時(shí)主要情況分析:首先是控制電源部分,通過(guò)單片機(jī)管腳寫(xiě)高電平,使用繼電器單閘開(kāi)關(guān)選擇電源供電。數(shù)據(jù)流的寫(xiě)入就交給單片機(jī)IO端口完成。脈沖光控制:控制時(shí)鐘設(shè)置:通過(guò)TC0作為定時(shí)器,選擇控制脈沖寬度,一個(gè)定時(shí)器為4us,通過(guò)2個(gè)中斷來(lái)設(shè)置脈沖寬度:比較匹配,溢出匹配。比較匹配中斷:當(dāng)達(dá)到匹配值的時(shí)候,產(chǎn)生匹配中斷,輸出光信號(hào)溢出匹配:定時(shí)器技術(shù),達(dá)到計(jì)數(shù)值,產(chǎn)生中斷溢出,停止光輸出。
軟件設(shè)計(jì):直接用單片機(jī)寫(xiě)相應(yīng)的碼形。同步時(shí)鐘通過(guò)主機(jī)發(fā)送,當(dāng)有數(shù)據(jù)流時(shí),主機(jī)發(fā)送一個(gè)控制時(shí)鐘信號(hào),每個(gè)信號(hào)脈沖觸發(fā)一次外部的中斷。外部中斷重新清除定時(shí)器,重新開(kāi)始計(jì)數(shù)控制脈沖寬度。
2.1.2電光控制模塊
發(fā)送方需要把待發(fā)送信息調(diào)制到光載波上。在本系統(tǒng)中,就是利用電光調(diào)制來(lái)實(shí)現(xiàn)信息的調(diào)制。其中包括幅度調(diào)制和相位調(diào)制。電光調(diào)制即在光脈沖信號(hào)中加入有用信息,電路包括主要包括:信息產(chǎn)生電路,幅度控制電路,相位控制電路。下面一步一步來(lái)分析:信息產(chǎn)生電路:由FPGA產(chǎn)生隨機(jī)高斯數(shù)信號(hào)幅度控制電路:通過(guò)單片機(jī)控制數(shù)字信號(hào)轉(zhuǎn)換成模擬信號(hào)控制幅度調(diào)制器。 相位控制電路:通過(guò)單片機(jī)控制數(shù)字信號(hào)轉(zhuǎn)換成模擬信號(hào)控制相位調(diào)制器。
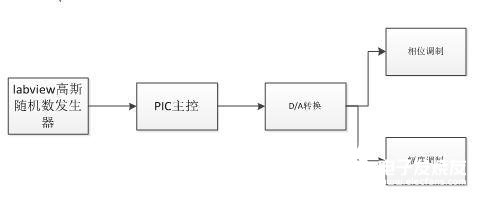
圖10. 電光調(diào)制硬件結(jié)構(gòu)圖
主要是通過(guò)Labview產(chǎn)生4位隨機(jī)碼,通過(guò)PIC變化成8為高斯隨機(jī)碼,然后通過(guò)DA轉(zhuǎn)換器,把信號(hào)變成模擬信號(hào),模擬信號(hào)經(jīng)兩個(gè)聲光調(diào)制器,首先進(jìn)行幅度調(diào)制,然后進(jìn)行相位調(diào)制。
電源部分:分析供電部分:PIC單片機(jī)采用5V供電,一個(gè)MC7812或者LM7812 提供12V電壓,一個(gè)MC7805或者LM7805提供5V電壓,通過(guò)LM117把5V電壓將為3.3V。電流在500MA保持住。電路設(shè)計(jì)圖如下:
隨機(jī)數(shù)產(chǎn)生:
上位機(jī)采用LABVIEW程序產(chǎn)生隨機(jī)高斯數(shù),通過(guò)數(shù)據(jù)采集卡輸出4位隨機(jī)數(shù),模擬有用信號(hào)。LABVIEW是NI公司設(shè)計(jì)一種虛擬儀器軟件。虛擬儀器(virtual instrumention)是基于計(jì)算機(jī)的儀器。計(jì)算機(jī)和儀器的密切結(jié)合是目前儀器發(fā)展的一個(gè)重要方向。粗略地說(shuō)這種結(jié)合有兩種方式,一種是將計(jì)算機(jī)裝入儀器,其典型的例子就是所謂智能化的儀器。隨著計(jì)算機(jī)功能的日益強(qiáng)大以及其體積的日趨縮小,這類(lèi)儀器功能也越來(lái)越強(qiáng)大,目前已經(jīng)出現(xiàn)含嵌入式系統(tǒng)的儀器。另一種方式是將儀器裝入計(jì)算機(jī)。以通用的計(jì)算機(jī)硬件及操作系統(tǒng)為依托,實(shí)現(xiàn)各種儀器功能。LabVIEW(Laboratory Virtual instrument Engineering)是一種圖形
上位機(jī)采用LABVIEW程序產(chǎn)生隨機(jī)高斯數(shù),通過(guò)數(shù)據(jù)采集卡輸出4位隨機(jī)數(shù),模擬有用信號(hào)。LABVIEW是NI公司設(shè)計(jì)一種虛擬儀器軟件。虛擬儀器(virtual instrumenTIon)是基于計(jì)算機(jī)的儀器。計(jì)算機(jī)和儀器的密切結(jié)合是目前儀器發(fā)展的一個(gè)重要方向。粗略地說(shuō)這種結(jié)合有兩種方式,一種是將計(jì)算機(jī)裝入儀器,其典型的例子就是所謂智能化的儀器。隨著計(jì)算機(jī)功能的日益強(qiáng)大以及其體積的日趨縮小,這類(lèi)儀器功能也越來(lái)越強(qiáng)大,目前已經(jīng)出現(xiàn)含嵌入式系統(tǒng)的儀器。另一種方式是將儀器裝入計(jì)算機(jī)。以通用的計(jì)算機(jī)硬件及操作系統(tǒng)為依托,實(shí)現(xiàn)各種儀器功能。LabVIEW(Laboratory Virtual instrument Engineering)是一種圖形化的編程語(yǔ)言,它廣泛地被工業(yè)界、學(xué)術(shù)界和研究實(shí)驗(yàn)室所接受,視為一個(gè)標(biāo)準(zhǔn)的數(shù)據(jù)采集和儀器控制軟件。LabVIEW集成了與滿(mǎn)足GPIB、VXI、RS-232和RS-485協(xié)議的硬件及數(shù)據(jù)采集卡通訊的全部功能。它還內(nèi)置了便于應(yīng)用TCP/IP、AcTIveX等軟件標(biāo)準(zhǔn)的庫(kù)函數(shù)。這是一個(gè)功能強(qiáng)大且靈活的軟件。利用它可以方便地建立自己的虛擬儀器,其圖形化的界面使得編程及使用過(guò)程都生動(dòng)有趣。圖形化的程序語(yǔ)言,又稱(chēng)為“G”語(yǔ)言。使用這種語(yǔ)言編程時(shí),基本上不寫(xiě)程序代碼,取而代之的是流程圖或流程圖。它盡可能利用了技術(shù)人員、科學(xué)家、工程師所熟悉的術(shù)語(yǔ)、圖標(biāo)和概念,因此,LabVIEW是一個(gè)面向最終用戶(hù)的工具。它可以增強(qiáng)你構(gòu)建自己的科學(xué)和工程系統(tǒng)的能力,提供了實(shí)現(xiàn)儀器編程和數(shù)據(jù)采集系統(tǒng)的便捷途徑。使用它進(jìn)行原理研究、設(shè)計(jì)、測(cè)試并實(shí)現(xiàn)儀器系統(tǒng)時(shí),可以大大提高工作效率。
下面是設(shè)計(jì)的隨機(jī)數(shù)參數(shù)軟件界面:
幅度控制電路:
幅度控制和相位控制都是來(lái)控制輸入電壓,通過(guò)輸入電壓的改變來(lái)改變光載波的幅度與相位。
按照說(shuō)明書(shū)通過(guò)這個(gè)公式控制幅度:
電光相位調(diào)制器驅(qū)動(dòng)源的輸入范圍為0V到4V,而電光振幅調(diào)制器驅(qū)動(dòng)源的輸入范圍為0.3V到1V。
相位控制電路:
相位控制和幅度控制都是來(lái)控制輸入電壓,通過(guò)輸入電壓的改變來(lái)改變光載波的幅度與相位。
按照說(shuō)明書(shū)通過(guò)這個(gè)公式控制相位:
電路整體設(shè)計(jì):
通過(guò)labview輸入四位二進(jìn)制隨機(jī)碼給單片機(jī),單片機(jī)控制產(chǎn)生8位二進(jìn)制碼行(通過(guò)查表法),控制數(shù)模轉(zhuǎn)換器。產(chǎn)生相應(yīng)的電壓驅(qū)動(dòng)模擬量。
單片機(jī)選擇:PIC32單片機(jī)。
數(shù)模轉(zhuǎn)換器選擇:MCP4725.優(yōu)點(diǎn):比較常用,功耗低,電路設(shè)計(jì)成熟,價(jià)格低廉。
工作方式的選擇:電流轉(zhuǎn)換模式和電壓轉(zhuǎn)換模式由于要求輸出電壓值,可以減小噪聲和漂移對(duì)運(yùn)算放大器的影響,下面是從PDF里找到的典型的使用電路方式:
MCP4725 是具有非易失性存儲(chǔ)器(EEPROM)的單通道12 位緩沖電壓輸出DAC。 用戶(hù)可將配置寄存器位(2位)和DAC輸入數(shù)據(jù)(12位)存儲(chǔ)到非易失性EEPROM(14 位)存儲(chǔ)器中。通過(guò)設(shè)置配置寄存器位可以把 DAC 配置成正常模式或節(jié)省功耗的關(guān)斷模式。 器件可以使用 2 線(xiàn) I2C 兼容串行接口,且由電壓范圍為2.7V 至 5.5V 的單電源供電。輸出電壓公式如下,更多內(nèi)容參考MCP4725工作手冊(cè)。下面我們使器件輸出1.6V的電壓。電壓轉(zhuǎn)換公式如下:
輸出電壓范圍為:0到 。
。
以這個(gè)DA為基礎(chǔ),設(shè)計(jì)DA轉(zhuǎn)換電路。DA寫(xiě)片選信號(hào)通過(guò)單片機(jī)產(chǎn)生PWM波控制寫(xiě)的頻率,也就是控制輸出信號(hào)產(chǎn)生時(shí)間間隔。
隨機(jī)碼的轉(zhuǎn)換:
把四位二進(jìn)制隨機(jī)碼轉(zhuǎn)換成8位二進(jìn)制碼,設(shè)置數(shù)碼對(duì)照表,查表進(jìn)行。
控制寫(xiě):通過(guò)端口產(chǎn)生PWM控制寫(xiě)入時(shí)間間隔。
控制程序設(shè)計(jì)模塊:
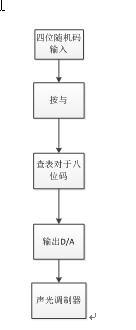
圖13:控制程序控制模塊
通過(guò)這種方法,我們可以來(lái)單獨(dú)或者聯(lián)合調(diào)制光信號(hào)的幅度和相位,這里面我先實(shí)現(xiàn)了單獨(dú)調(diào)制幅度和相位的工作。
2.2接收端電路設(shè)計(jì)
光信號(hào)檢測(cè)模塊主要應(yīng)用于兩方面[2]:一個(gè)是用于光信號(hào)數(shù)據(jù)采集;另一個(gè)則是用于實(shí)現(xiàn)發(fā)送與接收端之間的同步
檢測(cè)電路應(yīng)該分為幾個(gè)部分:第一:光電轉(zhuǎn)換和前置放大。第二部分:差分放大電路。
第三部分:有源濾波電路。下面就來(lái)分別對(duì)三個(gè)部分進(jìn)行介紹。
2.2.1 光探測(cè)電流模塊
本模塊的主要作用就是通過(guò)光電二級(jí)管把接收到的光信號(hào)轉(zhuǎn)變?yōu)殡娦盘?hào)。通過(guò)光電二級(jí)管BPX65接收光信號(hào),生成微弱的電流信號(hào)。測(cè)控生成電路信號(hào)可是設(shè)置為:

電流轉(zhuǎn)電壓通過(guò)SA5212變?yōu)殡妷盒盘?hào)。
輸出增益為:
SA5212的跨租增益值為:

其中
就可以求得。與實(shí)驗(yàn)相互驗(yàn)證。
2.2.1 光探測(cè)電流模塊
差分放大是最常用的線(xiàn)性放大方法。這里進(jìn)一步對(duì)信號(hào)進(jìn)行放大。這里選用AD8021作為運(yùn)算放大器,也可以選擇其他的AD放大器。
AD8021閉環(huán)增益為10的時(shí)候有190MHz的帶寬。方便線(xiàn)性控制。
根據(jù)放大器理論推算輸出:
去不同的電阻值,保證放大器線(xiàn)性
R3=R4=11O歐
R5=R6=2000歐
電壓增益:
噪聲增益:
沒(méi)有補(bǔ)償電容。
2.2.3 有源濾波模塊
有源濾波的作用是對(duì)前面的放大信號(hào)進(jìn)行濾波放大[3]。主要是要濾掉低頻分量,便于后端采集,避免頻譜混疊現(xiàn)象,并且低頻分量包括大量噪聲。
主要是設(shè)計(jì)二階低通濾波器。這里同樣可以采用AD8021做為主要器件,圖13給出了AD8021常用的電路運(yùn)用圖:
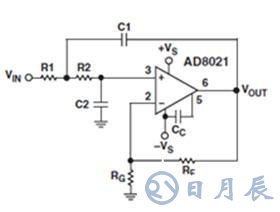
圖14:AD8021應(yīng)用電路
低通濾波器的增益為:
頻率響應(yīng):

歸一化傳遞函數(shù):
設(shè)置截止頻率為1.8MHZ。
可以得到相應(yīng)的電阻電容值。
則輸出電壓值:
總體電路如下:
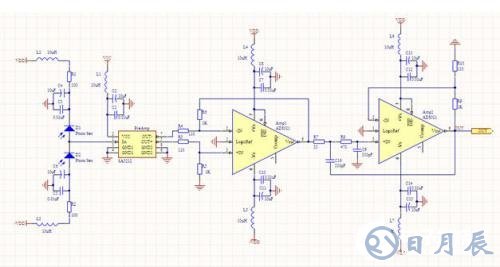
圖14: 光電感應(yīng)電路
三:總結(jié)
本次設(shè)計(jì)主要是針對(duì)相干光的控制和檢查系統(tǒng)來(lái)說(shuō)的。主要是設(shè)計(jì)了PIC控制光放射端。通過(guò)PIC控制聲光調(diào)制器形成合適的光源,然后幅度或者相位的編碼就交給PIC來(lái)控制電光調(diào)制器來(lái)完成。我們通過(guò)隨機(jī)數(shù)來(lái)模擬了信息碼,通過(guò)PIC來(lái)對(duì)合適的光源進(jìn)行信息編碼。在接收端,由于時(shí)間緊,僅僅設(shè)計(jì)了光電感應(yīng)電路,對(duì)于信息的處理控制也可以有PIC來(lái)完成,但限于只有一塊開(kāi)發(fā)板,而對(duì)于通信系統(tǒng)中,接收端和發(fā)射端控制應(yīng)該分離的基本原則,并沒(méi)有實(shí)現(xiàn)接收控制。這也是以后我們將繼續(xù)研究的方向。

