131 1300 0010
1 引言
步進電機是一種離散運動的裝置,它和現代數字控制技術有著緊密的本質的聯系。步進電機亦是一種將電脈沖轉化為角位移或直線位移的執行機構,當步進電機驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(又稱之為步進角),為此可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過脈沖頻率來控制步進電機的轉動速度和加速度,從而達到調速的目的。從以上所述可知,步進電機是可以用脈沖信號直接進行定位控制,由于其具有一定的精度,且控制線路簡單,使用方便、可靠;因此它廣泛地應用于工業自動控制、數控機床、組合機床、機器人、計算機外圍設備(掃描儀、磁盤驅動器、打印機)、照相機(包括光學照相機與數碼照相機),投影儀、數碼攝像機、放像機(VCD、DVD 等)、大型望遠鏡、衛星天線定位系統、醫療器械、條碼掃描儀以及各種可控機械工具等等。隨著經濟的發展,技術的進步和電子技術的發展,步進電機的應用領域更加廣闊,同時也對步時電機的運行性能提出了更高的要求。本文就采用當前流行的 PIC 單片機來對步進電機進行控制以及自適應控制技術在步進電機中的應用進行了研究和討論。
2、自適應控制原理
2.1 系統原理框圖
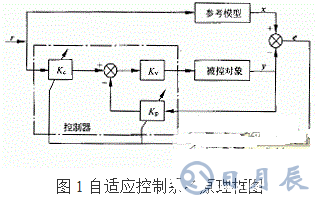
圖 1 所示為模型參考自適應控制系統原理框圖。從圖中我們可以看出與典型的反饋控制系統的不同之處是在圖 1 中增加了參考模型和自適應機構。在自適應控制系統中,當偏差信號 e(t)=x(t)-y(t)進入自適應控制回路后,經運算產生準實時的調整作用,從而改變控制器的參數,使得 x(t)-y(t)=e(t)趨向和直至等于零,此時自適應控制調整控制器參數過程完成。
2.2 基于 PIC 單片機構成步進電機自適應控制
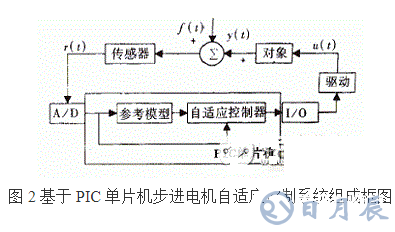
采用 PIC 單片機構成步進電機自適應控制系統如圖 2 所示。
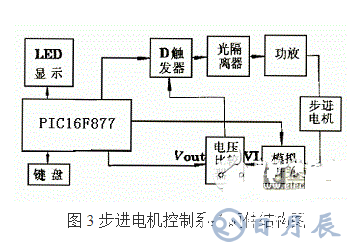
基于 PIC16F877 的步進電機控制系統硬件結構圖如圖 3 所示。
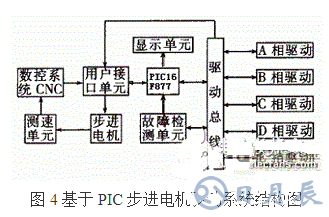
本文所討論的步進電機為應用于數控機床的 5 相混合式 90BYG550A-0301 型,其 PIC 步進電機驅動系統結構圖如圖 4 所示。
3、軟件設計
3.1 步進電機的升降曲線
常見的步進電機升降速運行曲線有三種,即直線型、階梯型、指數型,本文僅對直線型升降速曲線進行討論,如圖 5 所示。
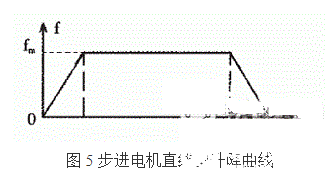
這種直線型升降速運行曲線的升(降)速的加(減)速度是恒定的,在開環控制時,由于不可能充分考慮步進電機輸出轉矩隨速度變化的特性,故此步進電機在高速時會發生失步,而本文所討論的控制系統中,由于反饋與自適應技術的應用,這個缺點可以得以克服。
由步進電機的工作原理可知,步進電機的輸出力矩隨著它的旋轉角速度變化,因此在整個升降速過程中,步進電機的角加速度應隨轉子角速度的變化而自適應地變化。使步進電機在不失步條件下,以最短的時間升速(降速)到給定速度,因此,尋求升降速曲線的自適應規律,是實現步進電機精確定位的關鍵。
3.2 軟件構成
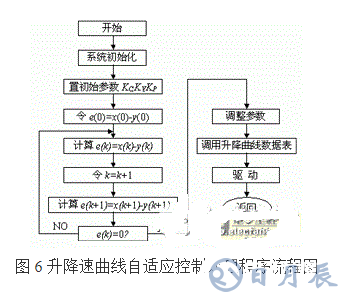
根據步進電機控制系統所要完成的功能,軟件程序主要有:故障中斷處理程序、定時移位中斷程序、步進控制信號中斷處理程序、相序刷新和通信處理程序、升降速曲線自適應控制處理程序。
以下主要介紹升降速曲線自適應控制處理程序。圖 6 為升降速曲線自適應控制處理程序流程圖。
4、討論
步進電機由于是由脈沖信號控制的,所以完全可以采用開環控制方式,這在精度要求不高的場合,不失為一種簡單、實用、經濟而可行的技術方案。但是,在開環控制的步進電機驅動系統中,其輸入的脈沖不依賴轉子的位置,而是事先按照一定規律給定的,控制系統不能跟隨運行頻率和負載大小而調整其控制參數,這就給步進電機的開環運行帶來一些不利因數,特別是在低頻、中頻的某些頻率點,將會出現振蕩,而在高頻區又將出現電磁力矩下降的情況;振蕩和電磁力矩的下降都有可能造成失步和位置控制不準的后果。
閉環反饋控制加自適應控制是直接或間接地檢測轉子的位置和速度,通過反饋和自適應處理,按照優化的升降運行曲線,自動地發出驅動的脈沖串,不僅可使步進電機的拖動力矩特性有顯著提高,可獲得更精確的位置控制和較高較平穩的轉速,而且可以使步進電機在許多其他領域內獲得更大的通用性與實用性。
5、結束語
采用自適應控制技術的 PIC 單片機實現方法應用于步進電機的控制驅動,可以充分利用步進電機的有效轉矩,動態過程的快速響應性和魯棒性都得到顯著地提高,縮短了升降速的時間,可防止失步和過沖現象。實驗結果表明,采用本文所述的自適應控制技術方案的步進電機能夠平穩可靠地沿著所設計的曲線與性能運行,升降速過程平穩而快速。由于 PIC 單片機價格低廉,性能可靠,集成度高,很多外圍元件都已集成到片塊內部,使得外圍電路很是簡潔,加之指令數少而精煉,故此采用 PIC 單片機作為步進電機控制系統的核心處理器是一種實用與經濟的選擇。

