131 1300 0010
深夜開車回家,卻發(fā)現(xiàn)自行車、體育器材和庭院修剪機鳩占鵲巢,你多么希望車庫能為愛車保留一席之地。
風雨交加的早上,辦公樓停車場已是虛位難覓,空車位與你仿佛隔了一條鴻溝。
周五晚上想去市中心放松,必須要確定可以為愛車找到棲身之地且能夠在停車入庫后正常打開車門,否則歡樂時光無從談起。
駕駛員難免遇到行程匆忙、回避麻煩或尋求便利的情況,在這些常見場景中真是有苦難言。
幸運的是,自動駕駛功能將緩解這類尷尬,提供更便利、舒適的駕駛體驗,即使是泊車這種日常操作也不在話下。
基礎環(huán)視系統(tǒng)為駕駛員提供可視化提示,從而讓他們更加全面地了解周圍環(huán)境。通過深度學習汽車攝像頭捕獲的視頻圖像,可提供更高級的服務,如檢測空的停車位、自動泊車和啟用無人駕駛的“自動代客泊車”功能。
這些自動功能(包括多攝像頭輸入、視覺感知和場景創(chuàng)建)需要汽車具有強大的處理能力。高級駕駛輔助系統(tǒng) (ADAS) 應用的處理器需要具有整合數(shù)以兆字節(jié)的視覺數(shù)據(jù)或其他傳感器數(shù)據(jù)的能力,從而為汽車創(chuàng)建一個經過解讀的環(huán)境,在有 / 無駕駛員的情況下均支持低速、安全操控車輛。針對這一挑戰(zhàn),德州儀器 (TI) 專門設計了 Jacinto™ 7 處理器系列。在此白皮書中,我們將說明汽車客戶如何借助 TIJacinto TDA4VM 器件構建 ADAS 應用,從而實現(xiàn)輔助和全自動泊車功能,還將提供各類細分的汽車市場(緊湊型、中型、大型和豪華版)對 Jacinto TDA4VM 處理器芯片和軟件平臺的技術要求,并介紹如何引入實現(xiàn)安全、舒適的全自動泊車所需的技術。
根據(jù)泊車輔助系統(tǒng)的不同功能,該系統(tǒng)可分為三個基本類型。表 1 對這三種類型進行了詳細的介紹。基礎環(huán)視系統(tǒng)使用多個攝像頭輸入為駕駛員提供汽車周圍區(qū)域的 360 度全景視圖。攝像頭輸入拼接到以汽車為中心的俯視圖中。該圖像以可視化的形式提供給駕駛員,以提供手動泊車輔助。顯示汽車與物體、路緣或停車線相對位置的多個圖層的疊加增強了環(huán)視圖像的可用性。
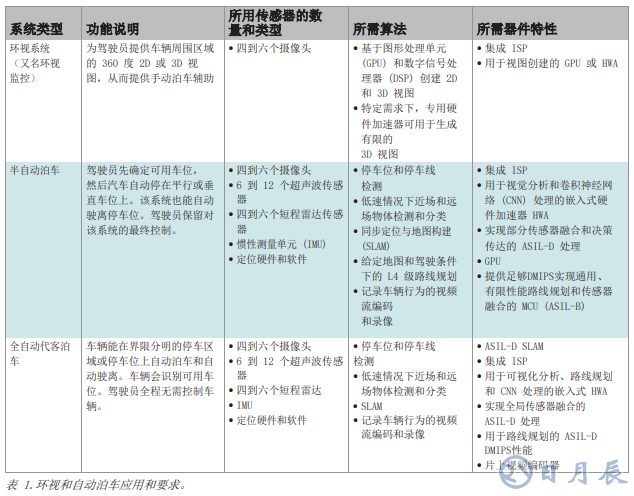
下一個類型的泊車輔助系統(tǒng)是半自動泊車系統(tǒng)。這類系統(tǒng)綜合了攝像頭、超聲和位置信息,能夠生成更詳盡的汽車周圍環(huán)境圖片,從而在某種程度上實現(xiàn)了自動泊車。借助上述信息,汽車將完成基本的泊車操作,即通過控制轉向、制動、加速和換檔,自動停在(或駛離)可用的水平或垂直車位。在這類場景中,駕駛員首先需找到一個空車位,且仍對負責自動泊車的系統(tǒng)進行完全控制(如需要)。
全自動代客泊車系統(tǒng)會接手后續(xù)步驟,控制汽車全自動駛入和駛離界限分明的停車場。泊車過程中,駕駛員會讓出確定可用車位后對車輛的控制。這一應用需要更多的傳感器輸入和更復雜的處理和算法,從而可靠、安全地自動完成泊車。
從基礎環(huán)視功能到全自動代客泊車,各個方案對傳感器、數(shù)據(jù)及數(shù)據(jù)處理的需求越來越高。
為實現(xiàn)這些應用而配置的處理器片上系統(tǒng) (SoC)需要:
圖像輸入通用處理加速特定的深度學習任務多層疊加的圖像渲染,以及有助于確保系統(tǒng)安全運行的符合汽車安全完整性等級 (ASIL) 的處理。
表 1 詳細說明了各個系統(tǒng)類型所需的算法和片上功能。 所有這些功能所需的絕對性能,如深度學習萬億次運算每秒 (DLTOPS)、每秒百萬條指令(DMIPS)、每秒十億次浮點運算 (GFLOPS) 或圖像信號處理器 (ISP) 或硬件加速器 (HWA) 引擎的百萬像素處理功能,可進一步將系統(tǒng)類型進行細分。
TDA4VM 處理器的 Jacinto 系列如何應對環(huán)視和自動泊車挑戰(zhàn)
正如你通過表 1 可能了解的情況一樣,汽車制造商的系統(tǒng)架構師和業(yè)務團隊以及一級供應商在將這些功能引入到汽車生產的過程中,面臨若干挑戰(zhàn)。首先,汽車制造商希望在各個車型上安裝一系列功能 - 經濟車型配備簡單環(huán)視功能,中型車和豪華車配備增強的感知和自動化水平。各個車型配備與其價格相符的設備:經濟車型無法與高端奢華車型配備相同的電子裝置。針對每一車型的不同軟件,開發(fā)和驗證處理器平臺不僅費時,而且成本高昂。
有一種解決方案可通過向基礎設計添加其他傳感器和攝像頭將低端汽車升級為高端汽車,一級供應商青睞能提供實施這種解決方案常見方法的平臺。重復利用硬件和軟件資產可提高必要的開發(fā)效率,從而最大限度地降低不同產品的研發(fā)成本并加快其進入市場速度。
Jacinto TDA4VM 處理器系列和 TI 的處理器軟件開發(fā)套件 (SDK) 相結合,為 OEM 和一級供應商解決這一問題提供了新的方法。該處理器可通過異構處理提高應用性能并降低功耗,使其適用于散熱和尺寸受限的嵌入式空間。TI 的 Jacinto TDA4VM SoC 采用硬件加速器、專用處理器核心、數(shù)字信號處理器(DSP)、通用處理器和微控制器 (MCU),可幫助設計人員制定高效的系統(tǒng)解決方案。TI 精選并設計了各種具有知識產權 (IP) 的組件,以幫助解決具體問題并符合各種終端系統(tǒng)的要求。
表 2 說明了簡單環(huán)視監(jiān)控應用和更復雜的自動代客泊車用例中常用的處理步驟和 IP 組件。

異構方法要求每種處理器內核或加速器使用特定的軟件。可通過更高級的軟件理念抽象封裝低級軟件棧,并針對硬件優(yōu)化,從而簡化開發(fā)并提供高性能訪問權限。OpenVX 就是這樣的一種免版稅開源軟件框架,專為實時嵌入式視覺處理而設計。TI 的 Processor SDK 通過基于 OpenVX 的例程,展示如何利用 SDK 中的軟件組件構建應用(如環(huán)視監(jiān)控)。
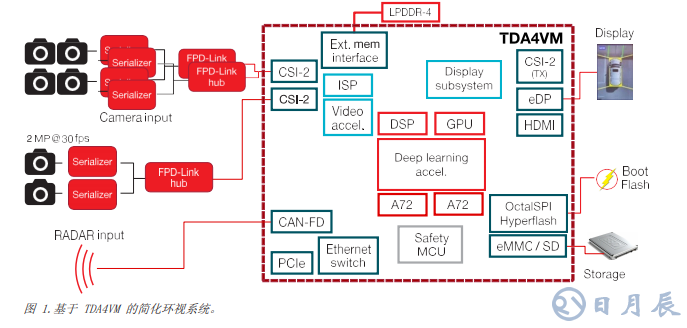
綜上所述:Jacinto TDA4VM SoC泊車輔助和自動化應用基本上都需要采集攝像頭和圖像傳感器數(shù)據(jù),并為處理階段進行預處理。處理階段處理圖像數(shù)據(jù)并執(zhí)行分析和深度學習算法,從而抽取與泊車應用相關的主要特性。這一階段整合(或融合)其他傳感器的數(shù)據(jù),從而形成汽車周圍環(huán)境更全面的感知,并提供給決策應用,此例中是安全操控汽車駛入和駛離停車位。最后一步則是以直觀的方式向駕駛員展示圖像數(shù)據(jù),從而幫助他們安全駕駛車輛。保存視頻數(shù)據(jù)留作日后查看也很有必要,尤其是在全自動場景中。所有這些操作都必須在能提供冗余并將任務關鍵型功能與其他操作進行邏輯或物理)分區(qū)的功能安全環(huán)境中進行。
TI 在 TDA4VM SoC 的設計中已考慮所有這些應用要求。基于對該系統(tǒng)的理解和提供高效、靈活且易用的解決方案的目標,TDA4VMSoC 包含多種組件來滿足采集、處理和渲染要求。其中的一個主要設計是平衡處理和數(shù)據(jù)需求,從而確保本地存儲有足夠的空間且能適當訪問高速外部存儲,同時確保處理系統(tǒng)高效運行。
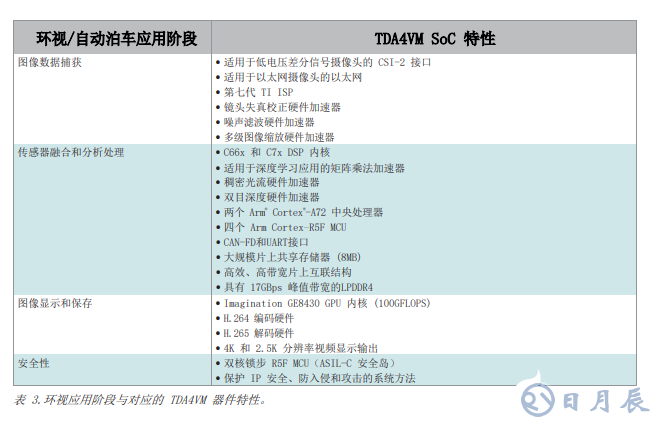
顯示視頻和其他傳感器輸入、顯示輸出和對壓縮視頻文件存儲器的訪問。表 3 介紹環(huán)視和自動泊車應用的處理階段,以及支持這些處理階段的 TDA4VM 器件的主要特性。 如上所述,TDA4VM 器件是非常完整的片上系統(tǒng),適用于這類泊車應用。芯片解決方案必須擁有與芯片配套的軟件環(huán)境。TDA4VM SoC 由適用于 Linux 的完整軟件套件和 TI 實時操作系統(tǒng) (RTOS) 內核支持。ProcessorSDK 套件包括一整套驅動程序、操作系統(tǒng)內核、應用庫、啟動例程、基于 OpenVX 的應用框架以及說明如何在真正的系統(tǒng)應用中使用軟件和硬件組件的應用示例。這些軟件開發(fā)套件(SDK)都在由 TI 提供的評估板卡上經過了驗證。
Jacinto TDA4 是一個產品系列,其中 TDA4VM 是本系列的第一款產品型號。該處理器系列的后續(xù)產品將包括同一芯片級 IP 的各種組合,從而為 ADAS 市場的各個領域(無論是偏重計算性能的應用還是對消費類汽車的更多成本優(yōu)化需求)提供更多優(yōu)化產品。由于這些器件采用相同的基本硬件 IP 和軟件架構,因此具有良好的兼容性。為特定型號開發(fā)的軟件可重復用于本系列中的其他器件,不僅可以提高開發(fā)效率,還方便在所有汽車型號中引進具有不同功能子集的完整產品線。您可以使用 Jacinto 系列產品輕松開發(fā)向泊車輔助和自動代客泊車方向發(fā)展的環(huán)視系統(tǒng)類應用。

