131 1300 0010
據(jù)調(diào)查,目前在我國的大、中、小型醫(yī)院及下屬社區(qū)衛(wèi)生院、診所等醫(yī)療機(jī)構(gòu)的輸液速度和輸液量幾乎都是不精確的值,憑肉眼觀察來估計輸液速度。輸液速度是護(hù)士通過轉(zhuǎn)動輸液器上的手動滑輪來控制的,輸液量也是護(hù)士用只有兩個標(biāo)記的液體瓶傾倒后估計的。利用人工監(jiān)視輸液情況,給病人和醫(yī)務(wù)人員帶來許多不便。隨著無線技術(shù)、網(wǎng)絡(luò)技術(shù)和計算機(jī)技術(shù)的迅速發(fā)展,為輸液采用無線、網(wǎng)絡(luò)監(jiān)控帶來了便利條件。目前已有一些相關(guān)輸液的研究成果,實現(xiàn)了輸液監(jiān)視、控制、報警等功能,但主要是單臺設(shè)備獨(dú)立使用,未能實現(xiàn)網(wǎng)絡(luò)監(jiān)控。文獻(xiàn)設(shè)計了一種基于RS485總線的輸液網(wǎng)絡(luò)化監(jiān)控系統(tǒng),但采用RS485總線和有線監(jiān)控在許多方面存在不足。由于CAN總線和無線技術(shù)在各個方面得到普遍應(yīng)用,為此,本文采用CAN總線和無線技術(shù)構(gòu)建一個新的網(wǎng)絡(luò)化、多功能輸液集中監(jiān)控系統(tǒng),以滿足醫(yī)院需要。
1 總體框架設(shè)計
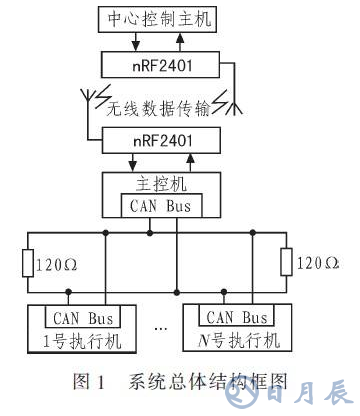
根據(jù)設(shè)計要求。系統(tǒng)由1個主控機(jī)和N個CAN節(jié)點執(zhí)行機(jī)組成,它們都掛接在雙絞線上,組成一個CAN總線通信局部通信網(wǎng)絡(luò),CAN總線通信網(wǎng)絡(luò)中的主控機(jī)安裝無線數(shù)據(jù)收發(fā)器nRF2401。與另一個中心控制主機(jī)組成無線通信網(wǎng)絡(luò),整個系統(tǒng)的關(guān)鍵任務(wù)是實現(xiàn)CAN總線內(nèi)部局域網(wǎng)通信以及無線通信網(wǎng)絡(luò)的通信。其系統(tǒng)總體結(jié)構(gòu)框圖如圖1所示。
2 CAN總線結(jié)構(gòu)
2.1 主控節(jié)點設(shè)計
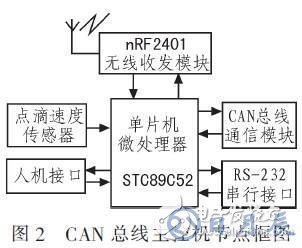
CAN總線主控機(jī)系統(tǒng)由單片機(jī)最小系統(tǒng)、CAN總線通信接口、人機(jī)接口、點滴速度傳感器和串口通信下載模塊及無線通信模塊組成。CAN總線通信接口通過雙絞線收發(fā)數(shù)據(jù),實現(xiàn)與執(zhí)行機(jī)的連通。結(jié)構(gòu)框圖如圖2所示,主控機(jī)負(fù)責(zé)與無線通信網(wǎng)絡(luò)進(jìn)行數(shù)據(jù)傳輸,同時也是CAN總線網(wǎng)絡(luò)中的一個節(jié)點,在整個系統(tǒng)中起著主導(dǎo)作用,無線通信模塊采用2.4 G的nRF2401通信芯片,而CAN總線通信模塊采用SJA1000和PCA82C 250,通過單片機(jī)控制,實現(xiàn)與其他節(jié)點通信。其他從節(jié)點除了沒有無線收發(fā)模塊以外,其他部分與主控機(jī)完全相同。
2.2 CAN通信模塊設(shè)計
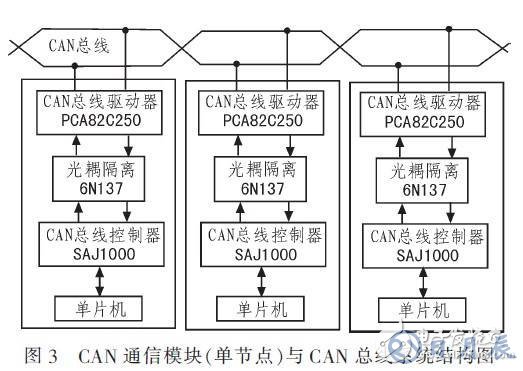
CAN通信模塊是本設(shè)計的核心,它負(fù)責(zé)系統(tǒng)中主控機(jī)和執(zhí)行器之間的數(shù)據(jù)通信。單個CAN總線節(jié)點由單片機(jī)、CAN總線控制器、高速光電耦合器及總線驅(qū)動器組成,可編程控制。故稱之為智能節(jié)點。設(shè)計中CAN通信模塊采用了獨(dú)立式的CAN控制器,數(shù)據(jù)通過對控制器編程寫入控制器芯片的發(fā)送緩沖區(qū)里發(fā)送出去,目的節(jié)點則負(fù)責(zé)把數(shù)據(jù)接收到數(shù)據(jù)接收緩沖區(qū)里,再通過CAN總線接口和單片機(jī)之間的數(shù)據(jù)總線,傳遞給單片機(jī)進(jìn)行處理。設(shè)計方案如圖3所示。
3 無線收發(fā)模塊
無線收發(fā)模塊采用nRF2401芯片,該芯片具有內(nèi)置地址解碼器、先入先出堆棧區(qū)、解調(diào)處理器、時鐘處理器、GFSK濾波器、低噪聲放大器、頻率合成器、功率放大器等功能模塊,只需要很少的外圍元件,使用非常方便。硬件電路連接實現(xiàn)單片機(jī)與nRF2401芯片的接口連接。發(fā)送端與接收端硬件連接幾乎一樣,具有通用性,可以實現(xiàn)半雙工通信。單片機(jī)使用的是STC89C52,成本低,控制簡單,容易擴(kuò)展。硬件電路如圖4所示。
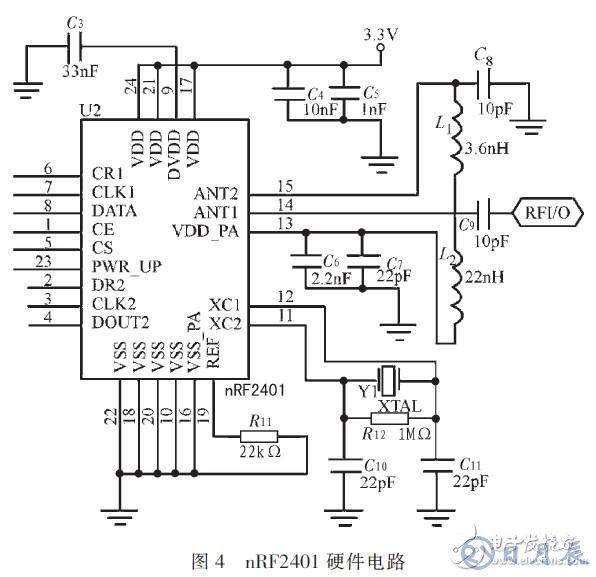
需要注意的是,nRF2401的供電電壓范圍為1.9~3.6 V,但引腳可直接收單片機(jī)5 V的I/O口相聯(lián)。為了使nRF2401更好地工作,最好進(jìn)行分壓處理。
4 系統(tǒng)軟件總體設(shè)計
根據(jù)設(shè)計要求,系統(tǒng)實現(xiàn)功能及軟件總體設(shè)計如圖5所示。系統(tǒng)包含兩大部分,無線服務(wù)終端和CAN總線通信系統(tǒng)。無線服務(wù)終端由nRF2 401和STC89C52組成,可以向CAN總線通信網(wǎng)絡(luò)中的任一節(jié)點發(fā)送和讀取數(shù)據(jù)。CAN總線通信系統(tǒng),由3個節(jié)點組成,一個節(jié)點上接無線收發(fā)器nRF2401負(fù)責(zé)與無線終端系統(tǒng)通信,另外2個節(jié)點由圖5所示的單片機(jī)CAN總線收發(fā)系統(tǒng)構(gòu)成。
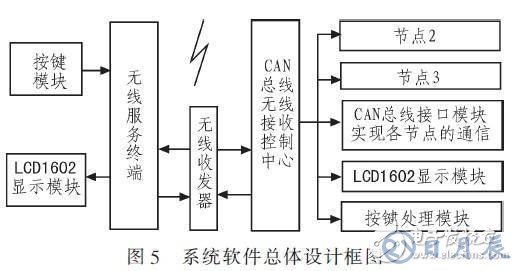
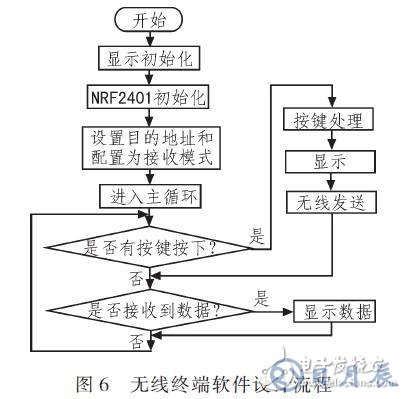
無線服務(wù)終端主要起中心控制主機(jī)的作用,通過無線模塊將指令發(fā)送到CAN總線無線接收控制中心,并接收該控制中心檢測數(shù)據(jù),顯示到服務(wù)終端液晶模塊中。指令信號可通過按鍵進(jìn)行設(shè)置,其主程序流程圖如圖6所示。
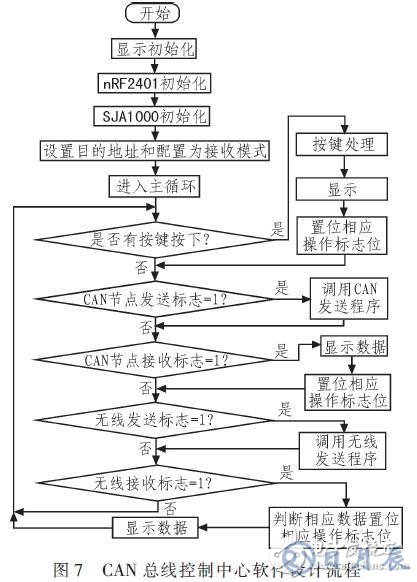
CAN總線無線接收控制中心的主要作用是將節(jié)點的數(shù)據(jù)由CAN總線通信上傳到控制中心,再通過無線發(fā)送到服務(wù)終端,并接收服務(wù)終端的指令,通過CAN總線通信下傳到相應(yīng)節(jié)點,CAN總線中心控制軟件流程如圖7所示,CAN總線通信、無線通信、節(jié)點程序流程和其他子程序流程在此不詳解。
完成所有軟、硬件后,對CAN總線內(nèi)部局域網(wǎng)通信、無線收發(fā)系統(tǒng)通信、CAN總線與無線收發(fā)系統(tǒng)相互通信3部分進(jìn)行測試,測試內(nèi)容主要有:CAN總線局域網(wǎng)內(nèi)部各節(jié)點自發(fā)自收、相互收發(fā)、一對多發(fā)送和多對一發(fā)送;無線終端與CAN總線之間相互收發(fā);單節(jié)點與中心控制主機(jī)的收發(fā)數(shù)據(jù)。以上每項測量發(fā)送10個字節(jié),所有結(jié)果顯示正確,各部分?jǐn)?shù)據(jù)傳輸正確,報錯率為0%。
5 結(jié)論
本論文根據(jù)中大型醫(yī)院的需要,針對現(xiàn)有靜脈輸液監(jiān)測技術(shù),提出了一種CAN總線和無線技術(shù)的輸液網(wǎng)絡(luò)監(jiān)控系統(tǒng)。設(shè)計并制作了CAN總線節(jié)點及通信模塊、無線數(shù)據(jù)收發(fā)模塊,并為系統(tǒng)開發(fā)了配套的軟件。完成了CAN總線內(nèi)部局域網(wǎng)通信、無線收發(fā)系統(tǒng)通信、CAN總線與無線收系統(tǒng)相互通信,試驗表明,該系統(tǒng)數(shù)據(jù)傳輸與收發(fā)正常,錯誤率為0%。

