131 1300 0010
時鐘周期:
時鐘周期也叫振蕩周期或晶振周期,即晶振的單位時間發出的脈沖數,一般有外部的振晶產生,比如12MHZ=12×10的6次方,即每秒發出12000000個脈沖信號,那么發出一個脈沖的時間就是時鐘周期,也就是1/12微秒。通常也叫做系統時鐘周期。是計算機中最基本的、最小的時間單位。
在8051單片機中把一個時鐘周期定義為一個節拍(用P表示),二個節拍定義為一個狀態周期(用S表示)。
機器周期:
在計算機中,為了便于管理,常把一條指令的執行過程劃分為若干個階段,每一階段完成一項工作。例如,取指令、存儲器讀、存儲器寫等,這每一項工作稱為一個基本操作。完成一個基本操作所需要的時間稱為機器周期。一般情況下,一個機器周期由若干個S周期(狀態周期)組成。8051系列單片機的一個機器周期同6個S周期(狀態周期)組成。前面已說過一個時鐘周期定義為一個節拍(用P表示),二個節拍定義為一個狀態周期(用S表示),8051單片機的機器周期由6個狀態周期組成,也就是說一個機器周期=6個狀態周期=12個時鐘周期。
在標準的51單片機中,一般情況下,一個機器周期等于12個時鐘周期,也就是機器周期=12*時鐘周期,(上面講到的原因)如果是12MHZ,那么機器周期=1微秒。單片機工作時,是一條一條地從RoM中取指令,然后一步一步地執行。單片機訪問一次存儲器的時間,稱之為一個機器周期,這是一個時間基準。
機器周期不僅對于指令執行有著重要的意義,而且機器周期也是單片機定時器和計數器的時間基準。例如一個單片機選擇了12MHZ晶振,那么當定時器的數值加1時,實際經過的時間就是1us,這就是單片機的定時原理。
但是在8051F310中,CIP-51 微控制器內核采用流水線結構,與標準的 8051 結構相比指令執行速度有很大的提高。在一個標準的 8051 中,除 MUL和 DIV以外所有指令都需要 12 或 24 個系統時鐘周期,最大系統時鐘頻率為 12-24MHz。而對于 CIP-51 內核,70%的指令的執行時間為 1或2個系統時鐘周期,只有 4 條指令的執行時間大于 4 個系統時鐘周期。 所以在計算定時器的值時要注意這里的變化。
指令周期:
指令周期是執行一條指令所需要的時間,一般由若干個機器周期組成。指令不同,所需的機器周期數也不同。對于一些簡單的的單字節指令,在取指令周期中,指令取出到指令寄存器后,立即譯碼執行,不再需要其它的機器周期。對于一些比較復雜的指令,例如轉移指令、乘法指令,則需要兩個或者兩個以上的機器周期。
系統時鐘:
系統時鐘:系統時鐘就是CPU指令運行的頻率,這個才是CPU真正的頻率。
單片機內部所有工作,都是基于由晶振產生的同一個觸發信號源,由這個信號來同步協調工作步驟,我們把這個信號稱為系統時鐘,系統時鐘一般由晶振產生,但在單片機內部系統時鐘不一定等于晶振頻率,有可能小于晶振頻率,也有可能大于晶振頻率,具體是多少由單片機內部結構決定,正常情況和晶振頻率會存在一個整數倍關系。系統時種是整個單片機工作節奏的基準,它每振蕩一次,單片機就被觸發執行一次操作。
一般來說,單片機只有一個時鐘源.用了外部晶振,就不用內部RC,用了內部RC,就不用外部晶振.振蕩器振蕩,產生周期波.單片機在這樣的周期波的作用一下有規律的一拍一拍的工作,波的頻率越高,單片工作得就越快,波的頻率越低,單片機工作得就越慢。
有了以上的概念以后,就可以正確的理解定時器的工作原理了,在8051F310單片機中,有3個定時器,如果定時器1工作在模式1下,如工作模式1下,是16位的計時器,最大數值是65535,當再加1時(=65536),就會發生溢出,產生中斷,所以如果我們要它計1000個數, 那么定時初值就是65536-1000,結果就是64536,這個值送給TH、TL,因為是16進制的,所以高位是64536/256取商,低位是64536%6取余。
再者,就是每一計數的時間是多久?一般我們取12M晶振時,一個周期剛好是1us,計數1000個就是1ms,這是因為標準的51單片機是12時鐘周期的(STC有6時鐘和1時鐘方式)。那么,如果我們晶振是12M,就比較好算,如果是其它的,就用12去除好了。比如是6M的,那么就是12/6=2,每個計數是2us,那么你要定時1ms就只要計數500個即可以。
定時器的初值跟定時器的工作方式,跟晶振頻率都有關系。一個機器周期Tcy=晶振頻率X12,計數次數N=定時時間t/機器周期Tcy,那么初值就X=65536-N,得出的數化成十六進制就行了。這里是用定時器O工作方式1做例子,如果是其它工作方式,就不能是65535了。工作方式0是8192,方式2,3是256。這里有一個公式:
TH=(65536-time/(12/ft))/256
其中,TIme就是要延時的100ms(要取100000us),ft是晶振頻率。這個式子又可以簡化成
TH=(65536-TIme*ft/12)/256
TL=(65536-TIme*ft/12)%6
在一本書上還看到了這樣計算定時初值的:
TH0=-(50235/256); //重裝100ms定時初值
TL0=-(50235%6); ///這里使用的6M晶體,
這里是6M晶體,延時100ms,那么按上面講的原理,6M是每個計數為2us,100ms定時就是計數50000個。
那么,定時器初值要 65536-50000=15536,轉成16進是3CB0。這就是要送給TH(=3C) 和TL(=B0)的值。
程序中寫 TH0=-(50235/256);其實它是這樣的TH0=0x100-(50235/256); 在51中,取負數,其結果就是它的值取反+1,也可以用0x100(十進制的256)去減,結果是多少呢?結果就是3C。
以STM32F103為例,進行解析
STM32的TIM一般有高級定時器TIM1,(TIM8只有在互聯性產品有),普通定時器TIM2,TIM3,TIM4,(TIM5,TIM6,TIM7有點設備中沒有);今天就只介紹普通定時器,因為高級定時器我還不會!每一個普通定時器都有4路通道!
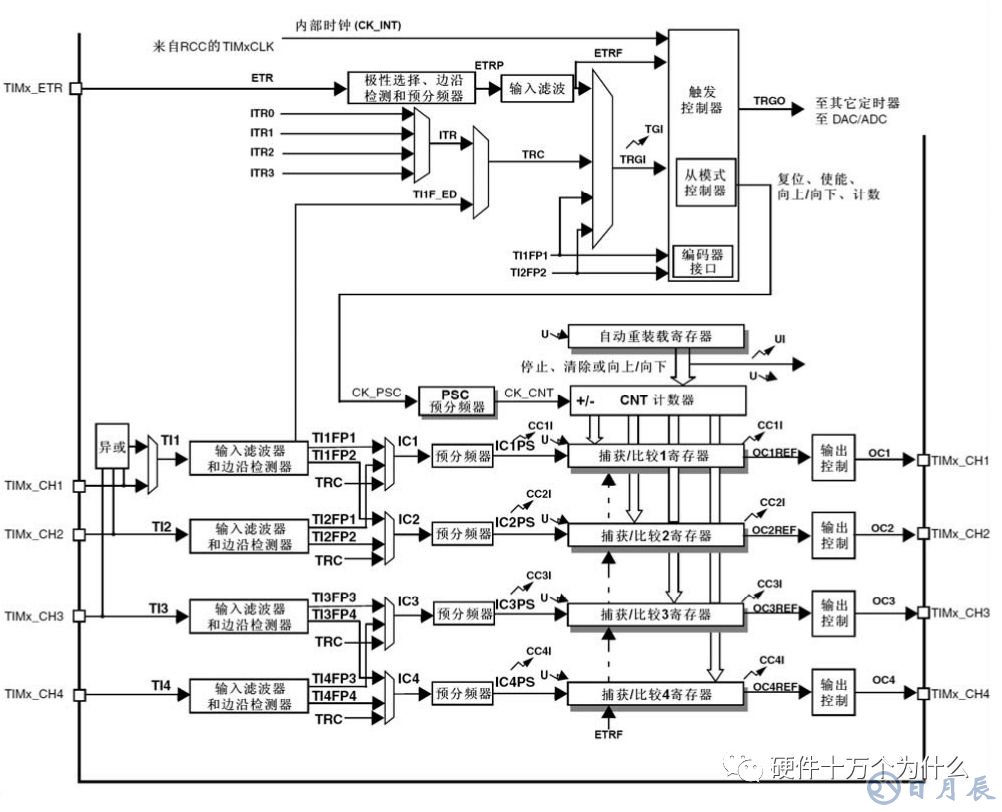
我們先看看這個邏輯圖吧!我們今天先討論討論定時器的問題!我用紅色筆標過的路線就是定時器的工作路線,時鐘有內部時鐘產生,到PSC哪里進行分頻處理,然后CNT進行計數,上面還有一個自動重裝載寄存器APP。
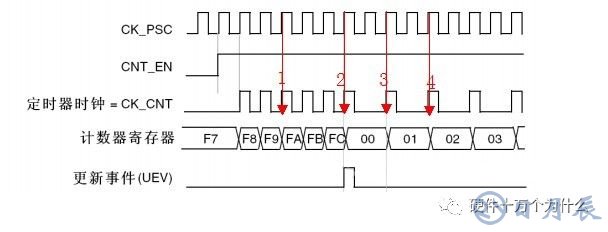
這個是分頻器的工作原理,我們可以看,分頻器設定之前分頻系數為1[1],后面的[2][3][4]分頻系數為2,分頻系數改變后,計數周期也跟著改變了;同時預分頻設置生效時,他還會產生一個中斷信號,這個中斷信號不要管他,一個系統時鐘周期后會自動消失,跟I2C的差不多!
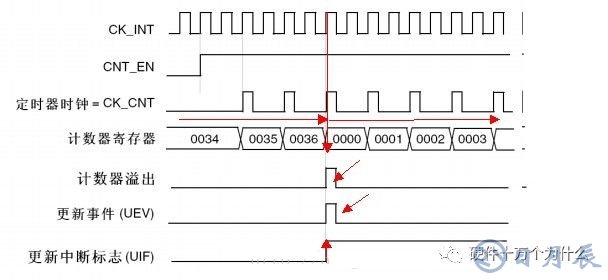
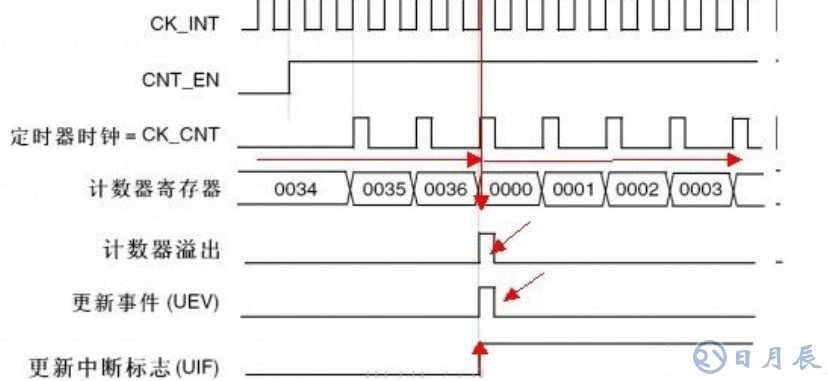
這個是計數過程,上面說過了,計數跟分頻后的周期有關;當計數達到裝載的數值之后,系統會產生一個三個信號,其中溢出信號和更新事件一個時鐘周期后會自動消失,而這時候觸發了更新中斷標志位UIF,我們可以用這個UPDATE來做定時器的中斷標志信號!
TIM_ITConfig(TIM2, TIM_IT_UPDATE, ENABLE);
stm32f103xx器件功能與配置
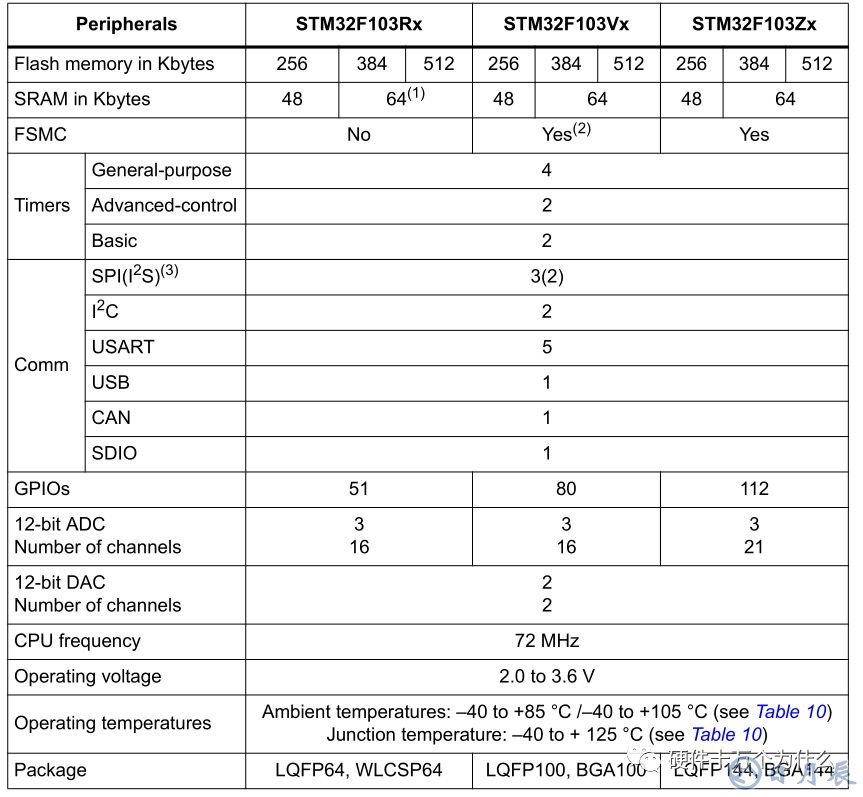
3、stm32f103zet6 定時器
大容量的STM32F103XX增強型系列產品包含最多2個高級控制定時器、4個普通定時器和2個基本定時器,以及2個看門狗定時器和1個系統嘀嗒定時器。
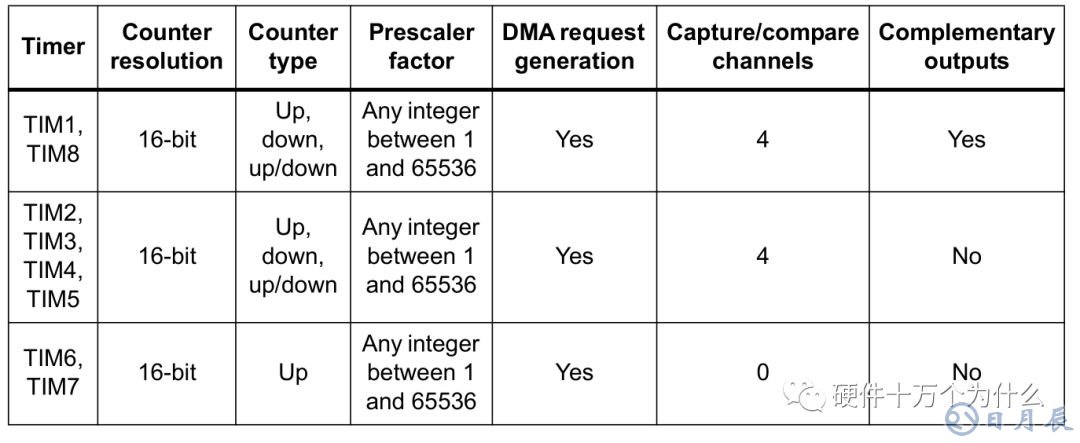
下表比較了高級控制定時器、普通定時器和基本定時器的功能:
定時器功能比較
1)計數器三種計數模式
向上計數模式:從0開始,計到arr預設值,產生溢出事件,返回重新計時
向下計數模式:從arr預設值開始,計到0,產生溢出事件,返回重新計時
中央對齊模式:從0開始向上計數,計到arr產生溢出事件,然后向下計數,計數到1以后,又產生溢出,然后再從0開始向上計數。(此種技術方法也可叫向上/向下計數)
2)高級控制定時器(TIM1和TIM8)
兩個高級控制定時器(TIM1和TIM8)可以被看成是分配到6個通的三三相PWM發生器,它具有帶死區插入的互補PWM輸出,還可以被當成完整的通用定時器。四個獨立的通道可以用于:
(1)輸入捕獲
(2)輸出比較
(3)產生PWM(邊緣或中心對齊模式)
(4)單脈沖輸出
配置為16位標準定時器時,它與TIMX定時器具有相同的功能。配置為16位PWM發生器時,它具有全調制能力(0~100%)。在調試模式下,計數器可以被凍結,同時PWM輸出被禁止,從而切斷由這些輸出所控制的開關。很多功能都與標準的TIM定時器相同,內部結構也相同,因此高級控制定時器可以通過定時器鏈接功能與TIM定時器協同操作,提供步或事件鏈接功能。
3)通用定時器(TlMx)
STM32F103XC、STM32F103XD和STM32F103XE增強型系列產品中,內置了多達4 個可同步運行的標準定時器(TIM2、TIM3、TIM4和TIM5)。每個定時器都有一個16位的自動加載遞加/遞減計數器、一個16位的預分頻器和4個獨立的通道,每個通道都可用于輸入捕獲、輸出比較、PWM和單脈沖模式輸出,在最大的封裝配置中可提供最多16個輸入捕獲、輸出比較或PWM通道。它們還能通過定時器鏈接功能與高級控制定時器共同工作,提供同步或事件鏈接功能。在調試模式下,計數器可以被凍結。任一標準定時器都能用于產生:PWM輸出。每個定時器都有獨立的DMA請求機制。
這些定時器還能夠處理增量編碼器的信號,也能處理1至3個霍爾傳感器的數字輸出。
4)基本定時器-TlM6和TIM7
這2個定時器主要是用于產生:DAC觸發信號,也可當成通用的16位時基計數器。獨立看門 狗獨立的看門狗是基于一個12位的遞減計數器和一個8位的預分頻器,它由一個內部獨立的40kHz的RC振蕩器提供時鐘; 因為這個RC振蕩器獨立于主時鐘,所以它可運行于停機和待機模式。它可以被當成看門狗用于在發生問題時復位整個系統,或作為一個自由定時器為應用程序提供超時管理。通過選項字節可以配置成是軟件或硬件啟動看門狗。在調試模式下,計數器可以被凍結。
5)窗口看門狗
窗口看門狗內有一個7位的遞減計數器,并可以設置成自由運行。它可以被當成看門狗用于在發生問題時復位整個系統。它由主時鐘驅動,具有早期預警中斷功能; 在調試模式下,計數器可以被凍結。
6)系統時基定時器
這個定時器是專用于實時操作系統,也可當成一個標準的遞減計數器。它具有下述特性:
(1)24位的遞減計數器
(2)自動重加載功能
(3)當計數器為0時能產生一個可屏蔽系統中斷
(4)可編程時鐘源
7)通用定時器的時鐘來源;
a:內部時鐘(CK_INT)
b:外部時鐘模式1:外部輸入腳(TIx)
c:外部時鐘模式2:外部觸發輸入(ETR)
d:內部觸發輸入(ITRx):使用一個定時器作為另一個定時器的預分頻器
8)通用定時期內部時鐘的產生:
從截圖可以看到通用定時器(TIM2-7)的時鐘不是直接來自APB1,而是通過APB1的預分頻器以后才到達定時器模塊。
當APB1的預分頻器系數為1時,這個倍頻器就不起作用了,定時器的時鐘頻率等于APB1的頻率;
當APB1的預分頻系數為其它數值(即預分頻系數為2、4、8或16)時,這個倍頻器起作用,定時器的時鐘頻率等于APB1時鐘頻率的兩倍。
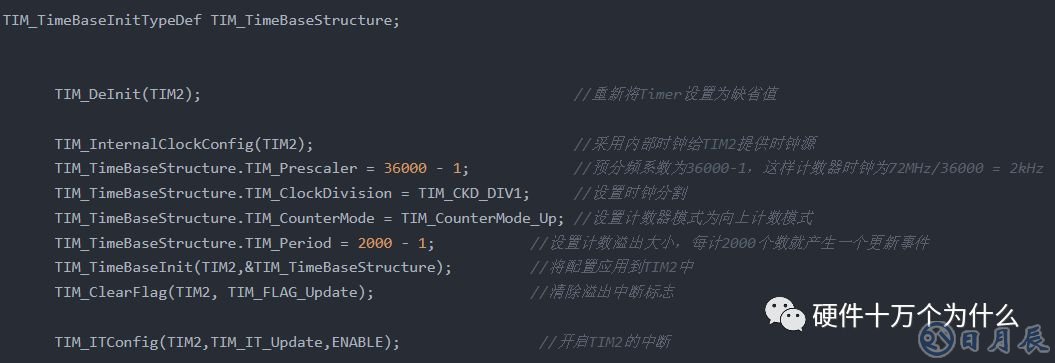
這里要分析一下幾個概念,也是理解定時器的功能的核心概念,通用定時器有些類似于操作系統的定時器節拍,可以在定時器采用的時鐘源的基礎上再進行分頻,然后再設定溢出大小,進而實現定時的功能,當然自動重載功能更不再話下。
預分頻的功能是使定時器在APB時鐘的基礎上再一次分頻,使其獨立的運行。就像上述代碼中舉例,預分頻系數設定為36000-1,則表示該定時器的 時鐘頻率就變成了72MHz/36000 = 2KHz,而“計數溢出大小”可以理解為自動裝載數值,表示每隔x個計數溢出一次,可以產生1次中斷,當然這個頻率是經過預分頻后的頻率。
所以從上述的分析可知,定時器的定時時間計算為:
Tout = (TIM_Period+1)*(TIM_Prescaler+1)/72000000
在本程序案例中:Tout= 2000*36000/72000000=1s
需要注意的是,公式中的72000000的使用,是因為該定時器采用的時鐘源為72MHz,如果配置成別的時鐘源,則相應公式也應該改變。
另外TIM_ClockDivision為時鐘分割,這個簡單的講,就是定時器的數字濾波功能,設置成默認即可。

