131 1300 0010
自動駕駛為基于光子學(xué)的傳感器帶來了機(jī)遇和挑戰(zhàn)。自動駕駛汽車需要激光雷達(dá)(LiDAR)、攝像頭、雷達(dá)和超聲波等許多類型的傳感器,預(yù)計(jì)每年數(shù)百萬的自動駕駛汽車將為這些傳感器帶來巨大的市場機(jī)遇。
自動駕駛汽車中的傳感器必須解決溫度、照明、反射、導(dǎo)航甚至網(wǎng)絡(luò)安全等多種性能挑戰(zhàn)。
攝像頭和激光雷達(dá)必須高可靠地生成安全導(dǎo)航所需要的數(shù)據(jù),在各種溫度、照明水平和目標(biāo)反射率下運(yùn)行多年。并且,還需要在低成本下提供這種性能,好比以消費(fèi)類產(chǎn)品的價(jià)格,提供航天產(chǎn)品的質(zhì)量。
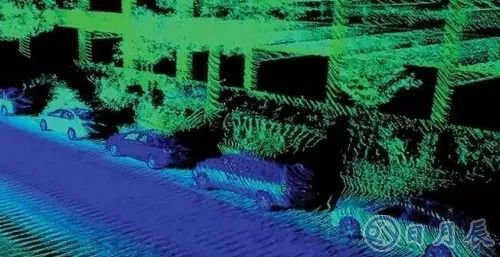
上圖激光雷達(dá)圖像中的顏色編碼反映強(qiáng)度,很容易看到車輛的黑色輪胎。這種性能對于自動駕駛很重要,因?yàn)榈缆飞蠒r(shí)常會出現(xiàn)車輛需要避讓的散落輪胎
因此,激光雷達(dá)和攝像頭供應(yīng)商正在不斷創(chuàng)新。如果自動駕駛汽車能夠在近年內(nèi)成功在大眾市場閃亮登場,激光雷達(dá)和攝像頭技術(shù)的進(jìn)步功不可沒。
Yole技術(shù)和市場分析師Alexis Debray指出,對多種傳感器的需求,源于這些不同技術(shù)的不同基本功能。“攝像頭具有良好的空間分辨率,但缺乏深度信息,”他說,“雷達(dá)具有良好的深度感知,但受限于橫向空間分辨率。而激光雷達(dá)能夠以中等分辨率實(shí)現(xiàn)兩者兼具。”
Debray稱,攝像頭相比雷達(dá)可以提供100倍的空間分辨率。而落在兩者之間的激光雷達(dá),其分辨率約為雷達(dá)的20倍,攝像頭的五分之一,填補(bǔ)了覆蓋范圍的空白。
自動駕駛使用多種類型的傳感器,還有另一個(gè)原因。“那就是安全,需要從多個(gè)傳感器獲取自動駕駛需要的冗余信息,”Debray說。
因此,激光雷達(dá)和雷達(dá)都用于提供有關(guān)物體距離的信息,以及物體之間距離變化的速度信息。攝像頭可以捕捉物體的顏色和其他特征。這些傳感數(shù)據(jù)可用于將物體分類,例如被風(fēng)吹起的塑料袋,或者需要避讓的行人或其他車輛,這些對于自動駕駛來說至關(guān)重要。攝像頭還可以捕捉街道交通標(biāo)志、探測車道標(biāo)記。

激光雷達(dá)已經(jīng)首次裝配在量產(chǎn)汽車中進(jìn)入大眾市場,盡管目前有些系統(tǒng)的覆蓋范圍和探測距離仍有限。然而,自動駕駛應(yīng)用的激光雷達(dá)系統(tǒng)需要足夠高的分辨率和足夠遠(yuǎn)的探測距離,以精確感知車輛的周圍環(huán)境。美國加州的激光雷達(dá)領(lǐng)導(dǎo)廠商Velodyne LiDAR首席技術(shù)官Anand Gopalan表示,這些要求對激光雷達(dá)系統(tǒng)提出了挑戰(zhàn)。Velodyne公司參與了全球許多自動駕駛汽車項(xiàng)目。
峰值功率
假設(shè)一輛自動駕駛汽車正以120公里/小時(shí)的速度在高速上行駛,在前方幾百米處出現(xiàn)了黑色的破損輪胎。據(jù)Gopalan介紹,輪胎的反射率約為10%,在這種情況下,激光雷達(dá)投射在輪胎上的數(shù)十億光子,只有數(shù)百個(gè)能反射回來。
“我們需要在激光器上獲得高峰值功率,”Gopalan說,“因?yàn)樗梢栽诿看螠y量距離的脈沖中發(fā)射盡可能多的光子。而探測器需要高靈敏度和低噪音。”
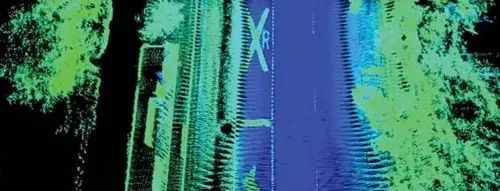
在激光雷達(dá)圖像中顏色編碼反映強(qiáng)度,車道標(biāo)志會“浮現(xiàn)”出來
這些返回的信息需要組合成距離數(shù)據(jù)的點(diǎn)云,然后對其進(jìn)行解讀。系統(tǒng)可能只有一秒的時(shí)間來執(zhí)行這些操作并采取某種行動,因?yàn)樵诟咚偕闲旭偟钠嚨膭x停距離可能需要近百米或更長。
Gopalan說,業(yè)內(nèi)廠商已經(jīng)開始為第一波自動駕駛汽車進(jìn)行規(guī)劃,預(yù)計(jì)到2022年將推出幾十萬輛自動駕駛汽車。他補(bǔ)充說,自動駕駛所需要的傳感器在性能、可擴(kuò)展性和成本方面,到時(shí)已經(jīng)能夠滿足行業(yè)的初期要求。他預(yù)測,隨著銷量的增加,這些傳感器的成本將進(jìn)一步下降。
將傳感器捕捉的數(shù)據(jù)通過汽車網(wǎng)絡(luò)發(fā)送回中央處理單元需要能耗,而分析這些數(shù)據(jù)需要更多的能耗和計(jì)算資源。因此,降低成本的一種途徑是使傳感器變得更智能,提高邊緣計(jì)算處理能力。
先進(jìn)的CMOS圖像傳感器可以提供適用于新一代駕駛輔助和自動駕駛系統(tǒng)的分辨率,這些圖像傳感器有助于對象的分類,從而實(shí)現(xiàn)更安全的導(dǎo)航。
滿足自動駕駛車輛需求的另一種方法是推出新技術(shù)。美國加州的激光雷達(dá)創(chuàng)業(yè)公司Quanergy Systems便提供了一個(gè)案例。Quanergy Systems首席執(zhí)行官兼聯(lián)合創(chuàng)始人Louay Eldada稱,該公司的核心專長在于光學(xué)相控陣技術(shù)。
通過數(shù)千個(gè)光學(xué)天線元件之間的干涉,該公司的芯片可以在不使用任何運(yùn)動部件的情況下形成并偏轉(zhuǎn)光束。據(jù)Eldada稱,Quanergy的激光雷達(dá)產(chǎn)品比同等性能的機(jī)械式激光雷達(dá)更小、更可靠。并且,這種系統(tǒng)功耗更低,可以用高幀率的低強(qiáng)度激光覆蓋周圍環(huán)境。
“這是一種紅外激光束。我們的工作波長為905 nm,因?yàn)槲覀兿Ml(fā)射器和接收器等所有芯片都采用硅材料和工藝,”Eldada說。
多激光雷達(dá)組合應(yīng)用
Eldada指出,每輛車上可能需要多個(gè)激光雷達(dá)。自動駕駛汽車必須能夠精確地“看到”周圍的一切,汽車制造商希望刷新率能夠達(dá)到50 fps,而單個(gè)激光雷達(dá)很難實(shí)現(xiàn)。如果激光雷達(dá)傳感器的安裝位置不影響車身設(shè)計(jì),則意味著車輛本身將會阻擋傳感器的部分視線。“因此,每輛自動駕駛汽車將需要3~5個(gè)激光雷達(dá),”Eldada說,“其中,4個(gè)是最優(yōu)的組合。因而每個(gè)激光雷達(dá)的價(jià)格需要降到數(shù)百美元區(qū)間。”
加拿大激光雷達(dá)創(chuàng)業(yè)公司LeddarTech則帶來了另一種達(dá)到成本和性能目標(biāo)的方案。LeddarTech總裁兼首席執(zhí)行官Frantz Saintellemy表示,該公司開發(fā)了自己的核心傳感技術(shù),并為客戶提供如何為汽車應(yīng)用構(gòu)建激光雷達(dá)系統(tǒng)的完整解決方案。
LeddarTech基于信號采集和處理技術(shù),可以使返回脈沖捕捉更多信息。據(jù)Saintellemy介紹,這可以用更低的成本獲得可接受的產(chǎn)品性能。例如,該公司的參考設(shè)計(jì)能夠使用905nm激光器和探測器達(dá)到數(shù)百米的探測距離,該波長的激光器和探測器比1550nm器件性能低,但成本低得多。
“今天我們選擇專注于905nm波長,因?yàn)檫@是目前更實(shí)際可行的技術(shù)方案,”Saintellemy說,“隨著1550nm技術(shù)變得更加標(biāo)準(zhǔn)化,我們可以通過選擇1550nm技術(shù)方案來顯著提高我們的產(chǎn)品性能。但是,現(xiàn)在我們并不需要利用它來實(shí)現(xiàn)當(dāng)前所需要的性能。”

