131 1300 0010
超聲波傳感器是利用超聲波技術研發的一種傳感器,超聲波傳感器的主要組成部件是既可以發射聲波又可以接受聲波的壓電晶片。用作探測的超聲波傳感器具有不同的結構,可分為直探頭、雙探頭、斜探頭等。構成壓電晶片的材料、厚度也各不相同。
超聲波測距原理是通過超聲波發射器發射聲波,當聲波遇到障礙物時返回,通過聲波的傳導速度和返回的時間計算出發射器距障礙物的距離,這就是時間差測距法。超聲波也是一種聲波,其傳播速度與溫度、壓強等因素有關,但在溫度變化不大的時候可以忽略溫度的影響。如果對測距的要求較高,應當采用溫度補償的方法進行校正。
超聲波傳感器的硬件組成
超聲波傳感器的硬件組成如圖所示。超聲波發送電路由晶體管,電阻,T/R40-16 壓電陶瓷超聲波傳感器和變壓器組成。由相關資料可知,頻率為40kHz左右的超聲波在空氣中的傳播效率最佳。其工作原理如下:

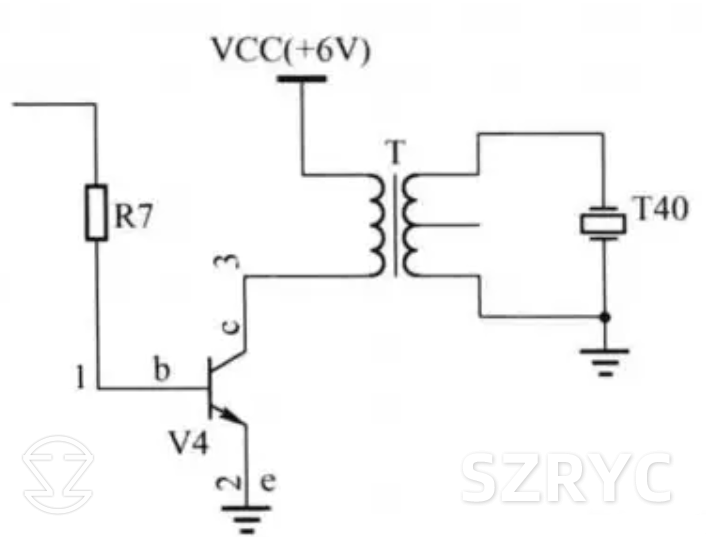
剛開始工作時,單片機通過軟件編程初始化端口,使引腳RA2為低電平,此時超聲波發射電路不工作。系統初始化完畢,單片機通過軟件控制RA2引腳輸出高電平使晶體管集電極變為低電平,然后變壓器把這個電壓升高,加載到超聲波傳感器T40的兩端,產生超聲波。若在有效測距方位內有被測物的話, 則在后一路超聲波發送出之前應當接收到前一路發出的回波,否則認為前面沒有障礙物。系統最大的測量距離范圍為9.99m,所以脈沖間隔時間為t=2s/v=2×9.99m/340 m/s=59 ms。超聲波電路由超聲波接收傳感器和一個三級放大,濾波電路組成,圖4-6所示為超聲波接收電路。其工作原理如下:由于在距離比較遠的情況下,超聲波的回波會變得很弱,因此超聲波接收傳感器轉換為電信號的幅值也較小,所以要經過信號的放大。當超聲波接收傳感器接收到超聲波信號后,經過一個三級放大電路,R40引腳由低電平變為高電平,單片機停止計數,計算距離。
超聲波傳感器主要有哪幾種類型?
超聲波傳感器是一種常用的測距設備,根據其工作原理和應用場景,可以分為以下幾種類型:
1. 超聲波測距模塊:這是最常見的超聲波傳感器類型。通常由超聲波發射器和接收器組成,可以測量物體與傳感器之間的距離。超聲波發射器發出超聲波脈沖,然后接收器接收并測量脈沖的回程時間,從而計算出距離。
2. 超聲波動態測距模塊:與普通的超聲波測距模塊相比,超聲波動態測距模塊可以提供更高的測距精度和快速測量速度。它適用于需要頻繁測量或快速移動目標的應用。
3. 聲吶傳感器:聲吶傳感器主要應用于水下測距和避障。它利用聲波在水中傳播的特性,通過發送超聲波信號并接收其回波,來測量水下目標的距離和位置。
4. 聲納傳感器:聲納傳感器主要應用于聲納定位和水下導航。它利用聲波在水中傳播和反射的原理,通過接收聲波信號的強度和延遲來確定目標的位置和方向。
5. 超聲波存在計測傳感器:這種傳感器可以檢測物體的存在或缺失。當物體進入或離開傳感器的工作范圍時,傳感器將檢測到超聲波信號的變化,并發送給控制系統進行相應的處理。
這些是超聲波傳感器的一些常見類型,根據具體的應用需求和場景,選擇適合的超聲波傳感器可以實現不同的功能和測量要求。

