131 1300 0010
遙控車的原理圖會涉及到兩個主要部分:遙控器(發(fā)送端)和遙控車(接收端)。
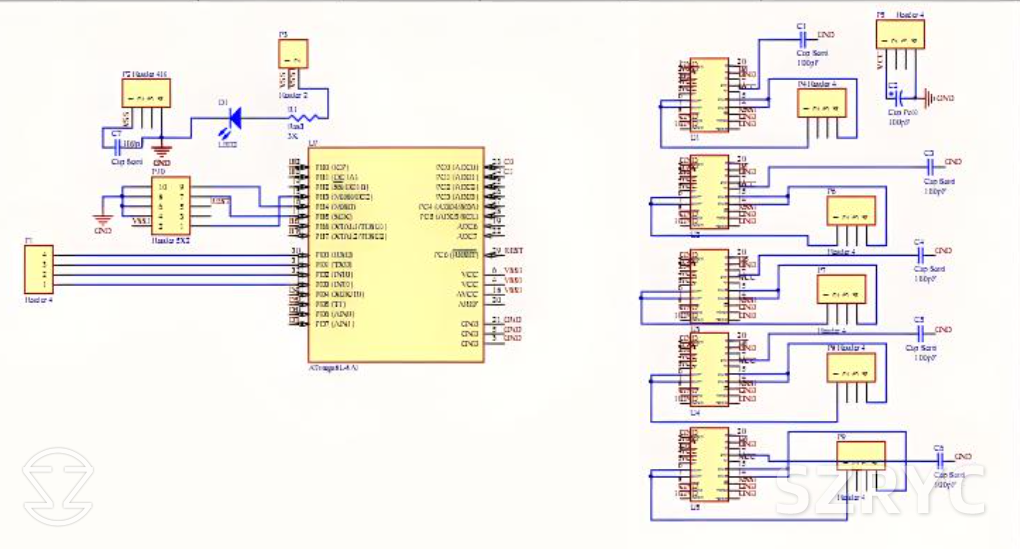
以下是一個簡化的原理圖:
1. **遙控器(發(fā)送端)**:
遙控器通常包括一個微控制器、一些按鈕或操縱桿用于輸入命令,以及一個無線發(fā)射器(例如RF模塊或者紅外模塊)用于發(fā)送命令。
當(dāng)用戶按下按鈕或移動操縱桿時,微控制器會讀取這些輸入,并通過無線發(fā)射器將對應(yīng)的命令發(fā)送出去。
2. **遙控車(接收端)**:
遙控車通常包括一個無線接收器(例如RF模塊或者紅外模塊)用于接收命令,一個微控制器用于解析命令,以及一些執(zhí)行器(例如電機)用于執(zhí)行命令。
當(dāng)無線接收器接收到命令時,微控制器會解析這些命令,并控制對應(yīng)的執(zhí)行器(例如電機)來執(zhí)行命令,如移動車輛或轉(zhuǎn)動車輛。
注意:這只是一個簡化的原理圖。實際的遙控車可能會更復(fù)雜,例如可能會包括一些傳感器用于檢測環(huán)境,或者一些額外的執(zhí)行器用于執(zhí)行更復(fù)雜的動作。

