131 1300 0010
由于圖像采集系統(tǒng)采集的數(shù)據(jù)量大,帶寬要求高,以往的圖像采集系統(tǒng)通常使用PCI總線實現(xiàn)。但是計算機本身配置的PCI接口數(shù)量非常有限,而且拆裝PCI接口設(shè)備需要打開機箱,一般操作人員并不具備這樣的能力,導(dǎo)致系統(tǒng)應(yīng)用受到限制。USB(通用串行總線)接口列可以完全解決以上難題。首先,USB2.0接口的速度已經(jīng)達到480Mbps,完全可以滿足圖像采集系統(tǒng)對速度的要求。另外,USB接口是真正支持即插即用,且允許熱插撥的接口,所以目前大量數(shù)據(jù)采集系統(tǒng)都選擇使用USB2.0接口實現(xiàn)。
本文利用SAA7113H實現(xiàn)模擬視頻信號解碼,并借助EZ-USB FX2單片機CY7C68013將數(shù)字圖像數(shù)據(jù)直接通過USB2.0接口傳輸?shù)接嬎銠C,通過PC機程序?qū)崿F(xiàn)圖像的無損采集,大大簡化了采集卡的硬件設(shè)計,降低了采集卡硬件要求,有效降低了圖像采集卡的成本。
1 系統(tǒng)硬件設(shè)計
系統(tǒng)硬件結(jié)構(gòu)如圖1所示。系統(tǒng)主要由視頻解碼芯片SAA7113H、USB控制芯片CY7C68013和一塊容量為1 kB的24C01EEPROM芯片組成。
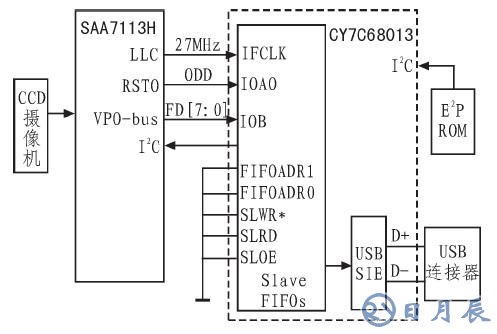
圖1 系統(tǒng)硬件結(jié)構(gòu)
1.1 視頻解碼芯片-SAA7113H
SAA7113H是飛利浦公司出品的一款視頻解碼芯片,它的作用是將輸入的模擬視頻信號解碼為標(biāo)準(zhǔn)的8位VPO數(shù)字信號。它可以輸入4路模擬視頻信號,通過I2C總線對內(nèi)部寄存器的不同配置可以對4路復(fù)合視頻輸入進行轉(zhuǎn)換,改變亮度、對比度等參數(shù)。SAA7113H兼容PAL、NTSC等多種制式,可以自動檢測場頻,可以在PAL、NTSC之間自動切換控制。SAA7113H解碼后輸出的是標(biāo)準(zhǔn)的YUV 4:2:2格式數(shù)字信號。
1.2 USB控制芯片--CY7C68013A
CYTC68013A(EZ-USB FX2)是Cypress半導(dǎo)體公司推出的一款USB2.0芯片,它內(nèi)部集成了增強的8051內(nèi)核,支持最大48 MHz的時鐘頻率,在相同時鐘頻率下,F(xiàn)X2的平均指令執(zhí)行速度可達到標(biāo)準(zhǔn)8051的2.5倍。CY7C68013芯片內(nèi)部集成了一個與8051內(nèi)核相對獨立的SIE(串行接口引擎),在不需要8051內(nèi)核參與的情況下,通過USB端口和外部邏輯共享FIFO的方式,實現(xiàn)外部數(shù)據(jù)與USB端口的數(shù)據(jù)交換,大大加快了數(shù)據(jù)傳輸?shù)乃俣龋蓪崿F(xiàn)的最大速度為480Mbps.
1.3 系統(tǒng)硬件實現(xiàn)
硬件連接方面,利用CY7C68013的I2C端口連接24C01,以便在系統(tǒng)上電后提取24C01中的信息,實現(xiàn)設(shè)備枚舉,下載相應(yīng)固件。利用CY7C 68013模擬I2C端口連接SAA7113H,對其內(nèi)部寄存器進行配置,實現(xiàn)解碼芯片初始化操作。CY7C68013工作在Slave FIFO(從屬的FIFO)模式,將SAA7113H的VPO數(shù)據(jù)總線直接連接到CY7C68013的FD總線,使用CY7C68013的IOAO端口檢測數(shù)字視頻的場標(biāo)志信號,用于實現(xiàn)幀同步。將CY7C68 013的SLWR*(從屬寫)信號量為有效,SLRD(從屬讀)和SLOE(輸出有效)置為無效,由SAA7113H通過自身輸出的27MHz同步時鐘將數(shù)字視頻信號以同步方式直接寫入CY7C68013內(nèi)部的FIFO,再通過SIE將FIFO中的數(shù)據(jù)以高速方式直接傳送到PC機,實現(xiàn)視頻數(shù)據(jù)的采集。
2 系統(tǒng)軟件設(shè)計
系統(tǒng)軟件設(shè)計主要包括固件程序設(shè)計、驅(qū)動程序設(shè)計和PC機采集程序3大部分。
2.1 固件程序設(shè)計
固件程序流程圖如圖2所示。該固件在采集卡上電后初始化CY7C68013,使其工作在Slave FIFO模式,設(shè)置總線位數(shù)為8位,以便接收SM7113H的8位數(shù)字視頻信號。將EP2端點設(shè)置為批量AUTO IN傳輸方式,512字節(jié)4倍FIFO緩沖。一次最大傳輸數(shù)據(jù)包大小為512字節(jié)。利用SAA7113H的時鐘信號實現(xiàn)同步從屬FIFO寫數(shù)據(jù)。
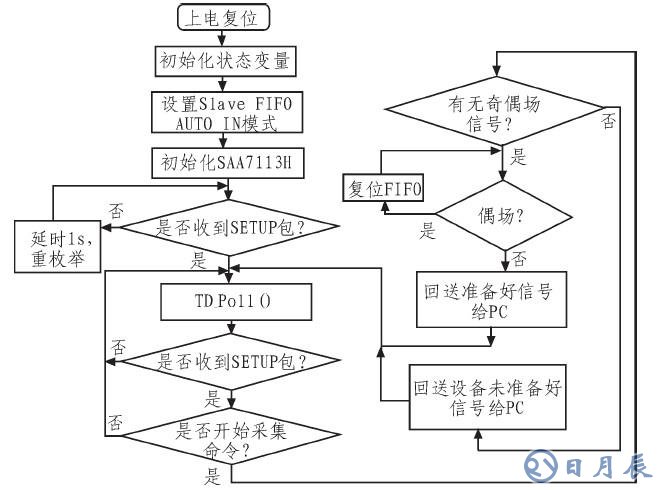
圖2 固件程序流程圖
通過模擬的I2C端口初始化SAA7113H,使其能夠接收CCD攝像機的模擬視頻信號,以標(biāo)準(zhǔn)的ITU656格式輸出,并設(shè)置RSTO輸出奇偶場標(biāo)志,然后等待上位機的開始采集命令。
在收到PC機開始圖像采集命令后,固件程序首先通過IOAO端口檢查SAA7113H的奇偶場信號。如果外部模擬視頻信號源未連接,該信號將一直維持高電平。固件在一段時間等待并確認(rèn)外部視頻信號未連接的情況下,向PC機回傳設(shè)備尚未準(zhǔn)備好的信息,否則一直清空FIFO,將FIFO中已有效據(jù)清除,直到奇場信號到來,固件回送設(shè)備準(zhǔn)備好信息給PC,以實現(xiàn)視頻圖像幀同步采集。圖像數(shù)據(jù)傳輸過程將由SIE完全控制,固件不參與傳輸操作。
2. 2 驅(qū)動程序設(shè)計
Cypress開發(fā)包中提供了一個通用驅(qū)動程序,即cyUSB.sys,該驅(qū)動程序符合Windows硬件質(zhì)量實驗室WHQL標(biāo)準(zhǔn),系統(tǒng)直接使用該驅(qū)動程序?qū)崿F(xiàn)圖像數(shù)據(jù)采集。由于CY7C68013采用的是軟配置的方案,芯片中并沒有提供用于永久存放固件程序的存儲器,固件程序需要在每次上電后通過外部存儲器加載或從PC機下載到內(nèi)部RAM中。驅(qū)動程序主要實現(xiàn)固件程序的裝載功能,以便系統(tǒng)上電后,可以自動從PC機下載固件到CY7C68013,然后使用通用驅(qū)動程序完成采集卡的設(shè)備重枚舉。
在Cypress提供的開發(fā)包中包含了一個固件下載驅(qū)動模板,即EZ-Loader Driver.系統(tǒng)固件下載驅(qū)動主要依賴它來實現(xiàn)。具體的步驟為:
1)利用hex2c.exe將Intel HEX格式文件轉(zhuǎn)換成C代碼數(shù)組。
2)將所有的EZ-Loader Driver文件連同子文件復(fù)制到一個新建的目錄中。并利用第一步得到的C代碼數(shù)組替換EZ-Loader Driver中firmwa re.c中的數(shù)組。
3)在WindowsXP DDK中使用build命令在新建目錄中創(chuàng)建固件下載驅(qū)動程序。
4)改寫驅(qū)動安裝信息文件。
2.3 PC機采集程序
PC機采集程序用Visual Studio.net 2003調(diào)用CyAPI函數(shù)庫實現(xiàn)。為提高圖片采集速度,程序使用兩個線程分別實現(xiàn)圖像數(shù)據(jù)采集和圖像甄別和處理。程序總流程圖如圖3所示。
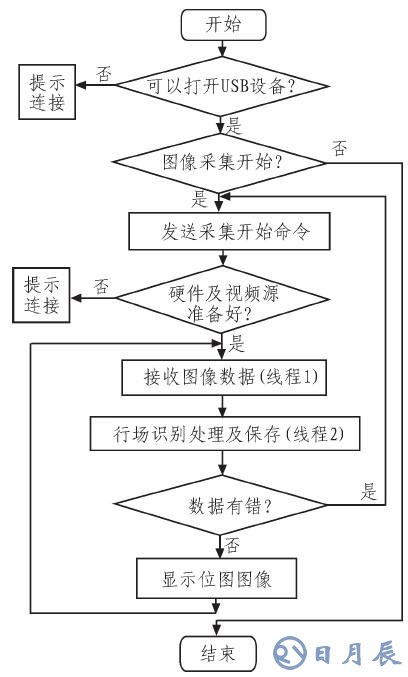
圖3 PC和諧總流程圖
每次啟動采集程序時,系統(tǒng)通過創(chuàng)建USBDeviee實例獲得設(shè)備句柄,并嘗試打開USB設(shè)備。當(dāng)點擊程序界面開始采集按鈕后,程序通過USB控制端點發(fā)送一個開始采集信號,并要求采集卡回傳一個設(shè)備狀態(tài)信號。如果設(shè)備提示無模擬視頻信號連接,則提示用戶連接。如果設(shè)備準(zhǔn)備好,則開始接收圖像數(shù)據(jù)。
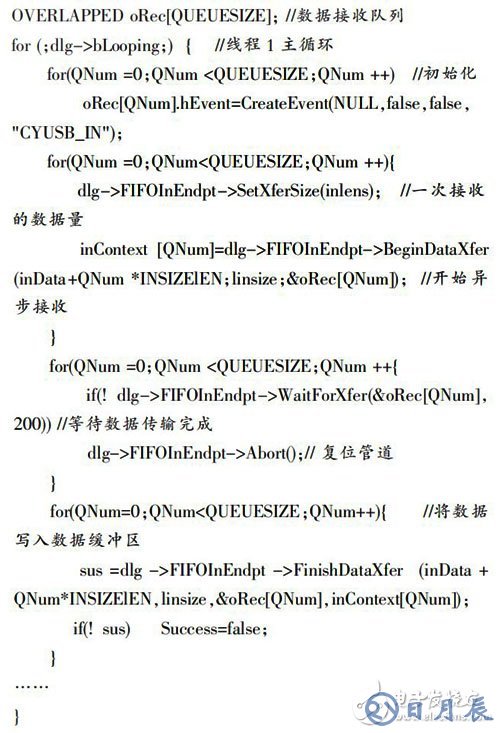
由于USB主控制器工作于Slave FIFO模式,采集卡上傳到上位機的數(shù)據(jù)量固定為27MB/S,如果上位機沒能及時接收數(shù)據(jù)必然會導(dǎo)致圖像數(shù)據(jù)丟失,所以程序中使用一個線程(線程1)以異步方式做圖像數(shù)據(jù)接收,實際效果非常好。線程1主要代碼如下:
SAA7113H輸出的是隔行視頻信號,每秒25幀圖像,一幀圖像需要分兩次傳輸,先傳輸全部奇場(奇數(shù)行)數(shù)據(jù),然后傳輸全部偶場(偶數(shù)行)數(shù)據(jù),采集卡中將SAA7113H的輸出設(shè)置為標(biāo)準(zhǔn)YUV4:2:2數(shù)據(jù),分辨率為720x576.系統(tǒng)將所有的解碼數(shù)據(jù)不做任何處理直接傳送到PC機,數(shù)據(jù)格式如圖4所示。其中,"80 10…"為消隱數(shù)據(jù)。"FF 00 00 SAV"為一行數(shù)據(jù)塊的開始標(biāo)志,作為奇場有效行,SAV的值為8X,作為偶場有效行,該值為CX."FF 00 00 EAV"為一行數(shù)據(jù)塊結(jié)束標(biāo)志,作為奇場有效行結(jié)束,EAV的值為9X,作為偶場有效行結(jié)束,該值為DX.作為720像素的YUV4:2:2數(shù)據(jù),每行一共有720x2=1 440個字節(jié),PC程序需要從所有的數(shù)據(jù)中找出每一行中有效的1 440個字節(jié)數(shù)據(jù),并按照實際行順序?qū)⑵鎴鲂邢嗯紙鲂袛?shù)據(jù)重新組合,轉(zhuǎn)換成RGB24位像素點并最終寫入BMP文件,實現(xiàn)圖像的采集、顯示和保存。

圖4 YUV4:2:2數(shù)據(jù)格式
數(shù)據(jù)查找及重組過程中,PC程序會根據(jù)YUV4:2:2數(shù)據(jù)格式做數(shù)據(jù)塊判別,如果發(fā)現(xiàn)有出錯數(shù)據(jù)程序會做自動拋棄處理,在對采集數(shù)據(jù)要求非常嚴(yán)格及單張采集間隔時間較長的場合,程序?qū)l(fā)送重新采集信號給采集卡,再一次采集。系統(tǒng)實際使用過程中發(fā)現(xiàn),數(shù)據(jù)出錯情況很少出現(xiàn),且重發(fā)請求后可以得到正確數(shù)據(jù)。
3 結(jié)論
利用本方案設(shè)計的圖像采集卡可以實現(xiàn)圖像的連續(xù)采集,并最終以bmp圖像格式保存,采集速率每秒最大25幀,適用于所有支持PAL模擬視頻格式的攝像機及監(jiān)控攝像頭的圖像無損采集,具有成本低、圖像清晰等特點,在光學(xué)顯微鏡序列切片圖像采集系統(tǒng)中得到了很好的應(yīng)用。另外,系統(tǒng)經(jīng)過簡單修改后也可實現(xiàn)4個復(fù)合視頻源輸入的分時采集功能。

