131 1300 0010
車鏡中的物體比其看起來更近,這一信息是經(jīng)過驗(yàn)證的真實(shí)安全警告,幾十年來一直提醒著駕駛員們,后視鏡所反映的視野與現(xiàn)實(shí)稍有差距。盡管有其局限性,但車鏡仍是汽車上的重要設(shè)備,可幫助駕駛員掉頭或變道。然而,如今先進(jìn)的駕駛輔助系統(tǒng)(ADAS)超越了車鏡的反射,通過攝像頭為駕駛員提供了基于駕駛座位的擴(kuò)展視角。
攝像監(jiān)控系統(tǒng)(CMS)也被稱為電子鏡或智能鏡,旨在以攝像頭和顯示屏的形式提供車鏡體驗(yàn)。想象一下,看著后視鏡顯示屏,就能看到車后的全景。當(dāng)您看著側(cè)視鏡時,您會看到一個可顯示您旁邊車輛的高分辨率顯示屏。這些情景正在成為現(xiàn)實(shí),其他功能(如盲點(diǎn)監(jiān)測系統(tǒng)和停車輔助系統(tǒng))也正在成為現(xiàn)實(shí)。
了解當(dāng)前從車鏡到CMS的轉(zhuǎn)換非常重要。如今的車輛系統(tǒng)中已將ADAS功能用于車鏡,這并不為奇。過去十年中,大多數(shù)新車都在車輛后部增加了一個攝像頭,或者將攝像頭安裝在現(xiàn)有的后視鏡上,并在車內(nèi)安裝了顯示屏,以便為駕駛者提供車輛后方或側(cè)面的不同視角。
圖1顯示了這款后視攝像頭和顯示系統(tǒng)的布線。后視顯示屏嵌入后視鏡,電纜通向車輛后部。
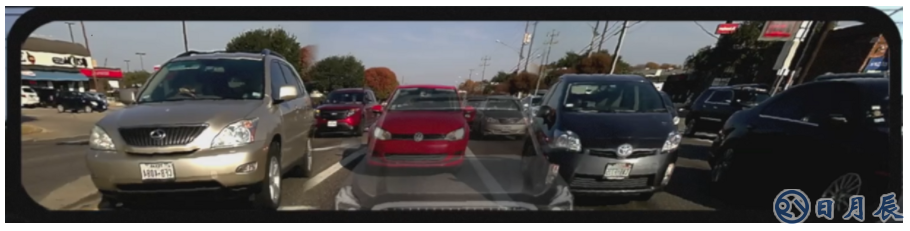
圖1:后視鏡顯示屏和后視攝像頭,用于全景或后視
因?yàn)閿z像頭位于車鏡上,所以側(cè)視鏡有所不同。側(cè)視鏡仍然用于查看,但是通常而言,當(dāng)駕駛員開啟方向燈或倒車時,其攝像頭才會工作。在轉(zhuǎn)彎或變道期間,攝像頭向儀表板上的信息娛樂顯示屏輸出視頻傳送,并可能顯示與側(cè)視鏡本身稍有不同的角度,如圖2所示。

圖2:信息娛樂顯示屏上顯示帶攝像頭的側(cè)視鏡
之前已經(jīng)說明了當(dāng)前采用車鏡與攝像頭和顯示屏相結(jié)合的CMS配置,值得注意的是,通過在車輛后部安裝一個或兩個攝像頭,可以實(shí)現(xiàn)CMS后視鏡更換。
從車輛后方來看,成像器的視頻數(shù)據(jù)輸入到TI的DS90UB933并行接口串行器或具有攝像串行接口(CSI)-2的DS90UB953串行器。然后將這些數(shù)據(jù)通過平板顯示器(FPD)-LinkIII同軸電纜串行到DS90UB934或DS90UB954解串器,然后輸出到應(yīng)用處理器進(jìn)行視頻處理(例如JacintoTM?TDAx處理器),然后顯示在后視鏡顯示屏上。如果顯示屏遠(yuǎn)離Jacinto應(yīng)用處理器,則需要顯示接口串行器和解串器將數(shù)據(jù)通過同軸電纜再次路由。您可以分別使用DS90UB921和DS90UB922紅綠藍(lán)(RGB)格式串行器和解串器,或者,如果您要應(yīng)用更高分辨率的顯示屏,則可以使用DS90UB947和DS90UB948開路低壓差分信號顯示接口(LDI)器件。
圖3顯示了在使用應(yīng)用處理器的板載顯示屏?xí)r這些設(shè)備之間的連接。
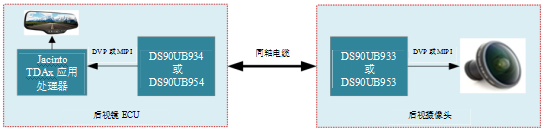
圖3:后視鏡系統(tǒng)框圖
第二個CMS是側(cè)視鏡更換部分。攝像頭必須位于車鏡原來的同一位置。該攝像頭的視頻數(shù)據(jù)顯示了駕駛員在鏡中看到的視角。為此,將攝像頭數(shù)據(jù)串行化并通過FPD-LinkIII同軸電纜發(fā)送到位于車門上部或后視鏡顯示屏中的遠(yuǎn)程顯示屏。借助攝像頭和顯示屏,如今側(cè)視圖可以為駕駛員呈現(xiàn)更直接的視線位置。例如,如果后視鏡中包含側(cè)視圖和后視圖的顯示屏,則駕駛員只需查看一個位置。
側(cè)視鏡更換的另一種選擇是以不同視角添加與第一攝像頭同位的第二攝像頭。與標(biāo)準(zhǔn)車鏡相比,這種設(shè)置的好處在于,借助兩個不同角度的攝像頭,一個攝像頭可以用于提供側(cè)視鏡視角,而第二個攝像頭可以為盲區(qū)檢測和碰撞警報(bào)功能提供更寬的視野。圖4顯示了雙攝像頭側(cè)視鏡更換系統(tǒng)。
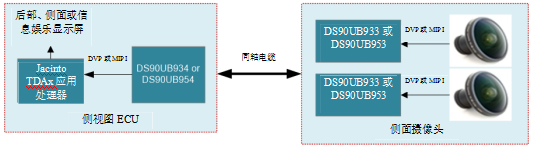
圖4:側(cè)視鏡更換系統(tǒng)框圖
現(xiàn)在您可能會問,如果駕駛員通過車鏡可以實(shí)現(xiàn)大部分相同的功能,那么為什么他們還需要攝像頭和顯示屏。答案就在于攝像頭可以通過車鏡單獨(dú)提供功能。如果只有側(cè)視鏡,則避免側(cè)向碰撞完全取決于駕駛員。通過攝像頭,可以在變道前檢測到潛在的碰撞,然后激活車輛警告警報(bào),從而防止駕駛員做出不明智的行為。帶有寬視場(FOV)后視攝像頭或單獨(dú)式狹窄聚焦后視攝像頭的全景后視圖可以為駕駛者提供不同的視線,并減少或消除單單使用車鏡無法發(fā)現(xiàn)的盲區(qū)。
但這僅僅是一個開始,為了使車輛從駕駛員輔助系統(tǒng)轉(zhuǎn)移到自主系統(tǒng),可以將CMS集成到傳感器融合系統(tǒng)中。CMS有可能與超聲波甚至雷達(dá)相結(jié)合。后視和側(cè)視攝像頭與超聲波的融合能夠在停車時輔助駕駛員,甚至可以代為停車。與后視鏡融合的雷達(dá)將為變道和避免側(cè)面碰撞提供額外的保護(hù)措施。

