131 1300 0010
步進電機驅動器是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速和定位的目的。
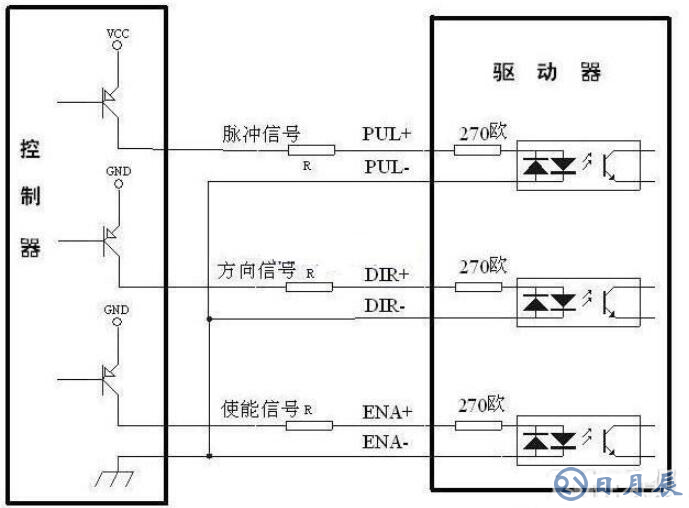
1、共陽極接法,共陰檢接法和差分方式接法

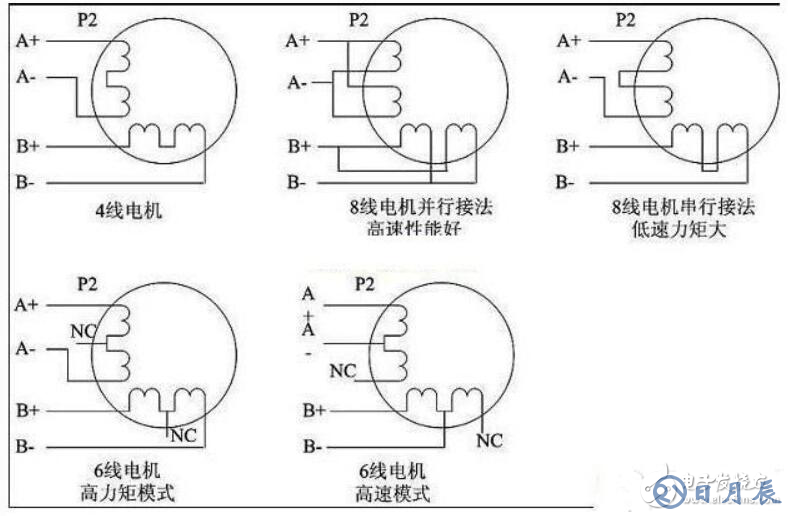
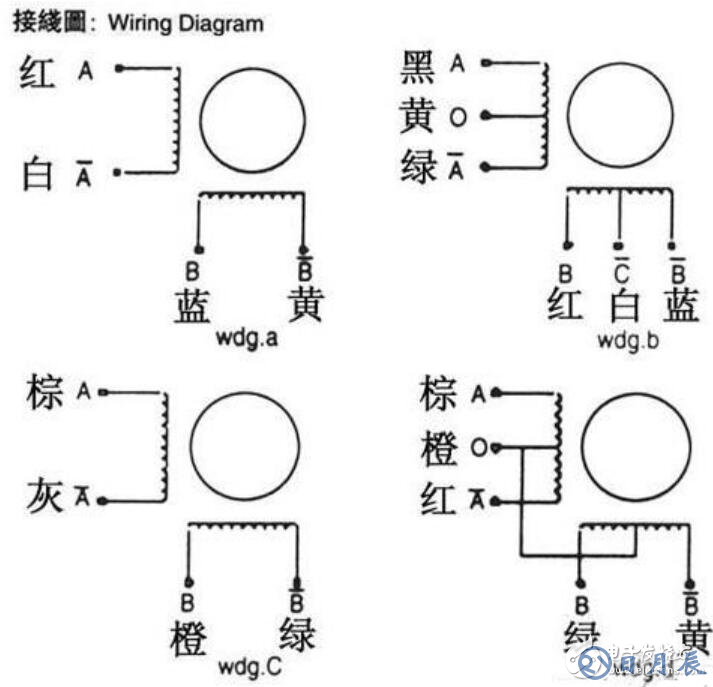
2、4,6和8線電機接線方法
4線電機和6線電機高速度模式:輸出電流設成等于或略小于電機額定電流值;
6線電機高力矩模式:輸出電流設成電機額定電流的0.7倍;
8線電機并聯接法:輸出電流應設成電機單極性接法電流的1.4倍;
8線電機串聯接法:輸出電流應設成電機單極性接法電流的0.7倍。
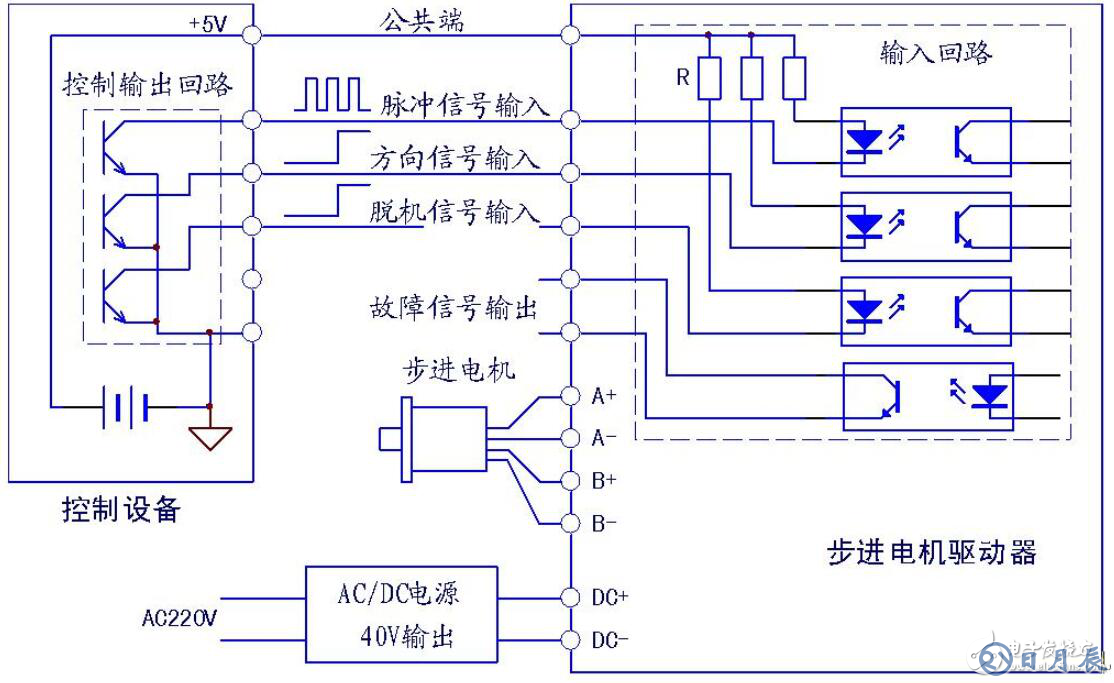
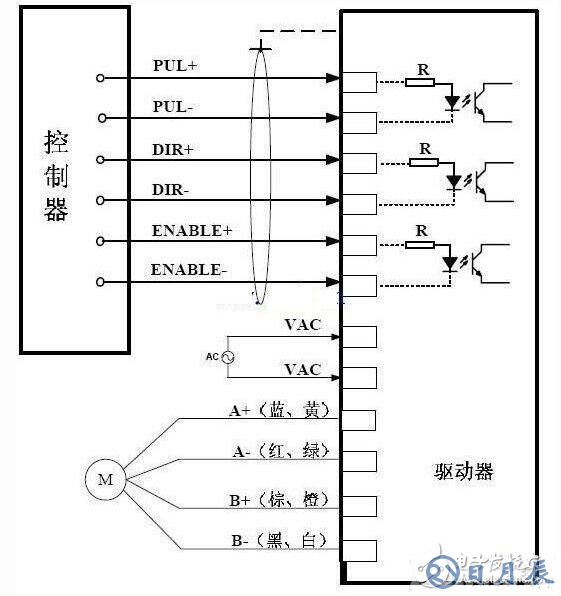
左圖為兩相步進電機驅動器的接線圖,控制設備可以是PLC的輸出回路,也可以是其它電器設備。步進電機驅動器最重要的控制信號有兩個:脈沖信號和方向信號。脈沖信號決定步進電動機的運轉速度,方向信號,決定步進電動機的旋轉方向。不僅僅是PLC ,任何設備只要能給出這兩個控制信號,便能控制步進電機的步進、轉速和旋轉方向。從脈沖信號輸入腳輸入的是頻率可變的、脈沖個數可控的脈沖信號,這種信號可由純硬件電路或軟件程序生成;方向信號則為常規開關量信號。

